Project
| # | Title | Team Members | TA | Documents | Sponsor |
|---|---|---|---|---|---|
| 14 | More than just a Chopping Board |
Richa Verma Rishabh Anand Suzy Ahn |
Anand Sunderrajan | design_document1.pdf design_document2.pdf design_document3.pdf design_document4.pdf final_paper1.pdf photo1.jpg presentation1.pdf proposal1.pdf proposal2.pdf |
|
| **Team:** Rishabh Anand (rishabh3), Suzy Ahn (sba2), and Vatsala (Richa) Verma (vatsala2) **Problem:** With people working from home and just staying indoors in general, cooking has become a lot more prevalent in most households, especially amongst college kids who don’t have the capital to eat out every day. An integral, often hated, hazard prone and time consuming part of the cooking process is chopping up the ingredients that need to go in the meal. While there exist blenders and choppers that let you cut vegetables in a specific way, there exists no universal automatic solution that lets you chop anything, especially in all the different ways of chopping (there’s 8 just for vegetables!). https://www.woodcuttingboards.com/news/the-different-types-of-vegetable-cutting-styles-170.aspx In addition, if we were to scale this problem to a more B2B perspective, high-grade restaurants prefer not to use pre-cut ingredients and in a COVID world where people would like to reduce the human interaction with their food, this solution could help kitchens move further towards putting their patrons at ease. **Solution Overview:** To help solve this problem and to save many eyes and hands from the hazards of chopping vegetables, our team is proposing a chopping board that is more than just a glorified polished block of wood - a chopping board that does the chopping for you! A similar product which added the ability sharp knives, weight food and sanitize the equipment with UV light raised $2Million+ on indiegogo (https://www.indiegogo.com/projects/chopbox-smart-cutting-board-with-10-features#/) which proves a clear market need and spending willingness for a solution in the space. Our solution will revolve around an attachment that can be placed on top of any chopping board and utilizes a camera to recognize the object being placed on the board to suggest the different ways in which it can be cut and subsequently suggests the user the correct knife to attach to a mechanical arm that then proceeds to chop the ingredients as required. The moonshot vision for this idea would be to enable it to even cut different kinds of meat cuts that require a level of skill and perfection that most at home chefs don’t possess. In addition, features like the knife sharpener and UV light sterilization from the indiegogo project can also be incorporated in this as further starshots! **Subsystem Components:** 1. **Computer Vision System:** This subsystem will require a camera to recognize the different vegetables being placed on the chopping board along with either a local store of the different ways in which the supported vegetables can be cut along with the knife required for them or a wifi module that connects with the internet in order to fetch this information from a realtime database that can keep adding new supported vegetables and other ingredients that require chopping. We would still run the actual CV locally, ideally, in order to keep server costs low and given the fact that CV for recognizing vegetables should be lightweight enough to not require too much compute. This subsystem would require something like an esp32 camera, and a WT8266-S1, ESP8266 Wi-Fi Module 2. **Screen/Selection Assembly:** We could either use a touchscreen to display the recognized vegetable and ask the user how they want the vegetable chopped up or just have buttons for the different selections and display the options. In addition, if we use a screen and go with the wifi module for the CV and vegetable database, we could ask users for feedback as well as let them enter the vegetable manually if the system incorrectly identifies the vegetable. We could use something like the ER-TFT024-3 display with touchscreen to achieve this. 3. **Chopping Directions Repository:** The solution will require a repository that holds the directions for the different ways in which the mechanical arm needs to move in order to achieve different chopping results as well as the correct knife for that specific ingredient. This would again be stored on local storage or use a database for extensible support, once the user selects the desired chopping method the mechanical arm will receive the instructions for movement. This is a software requirement and we could use google firebase which will be free to use. 4. **Mechanical Arm and Knife Housing:** The mechanical arm is where the users will insert the knife suggested by the board and which will subsequently move in order to achieve the desired cut. In order to simplify the mechanical aspect of this project we could also use an assembly instead of an arm that can move up and down and rotate in any direction in order to make the mechanical development a little easier. This assembly is the meat and bones of the project (pun intended) and would require horizontal tracks up top which can be built with a motor and belt, on which will be mounted a rotation assembly, inside which we will have a linear actuator like the GR9863 which can exert up to 900N of force, the knife will be mounted using parallel clamps which themselves will be mounted on a set of servos in order to further give add another degree of motion in order to fully replicate a proper chopping technique. [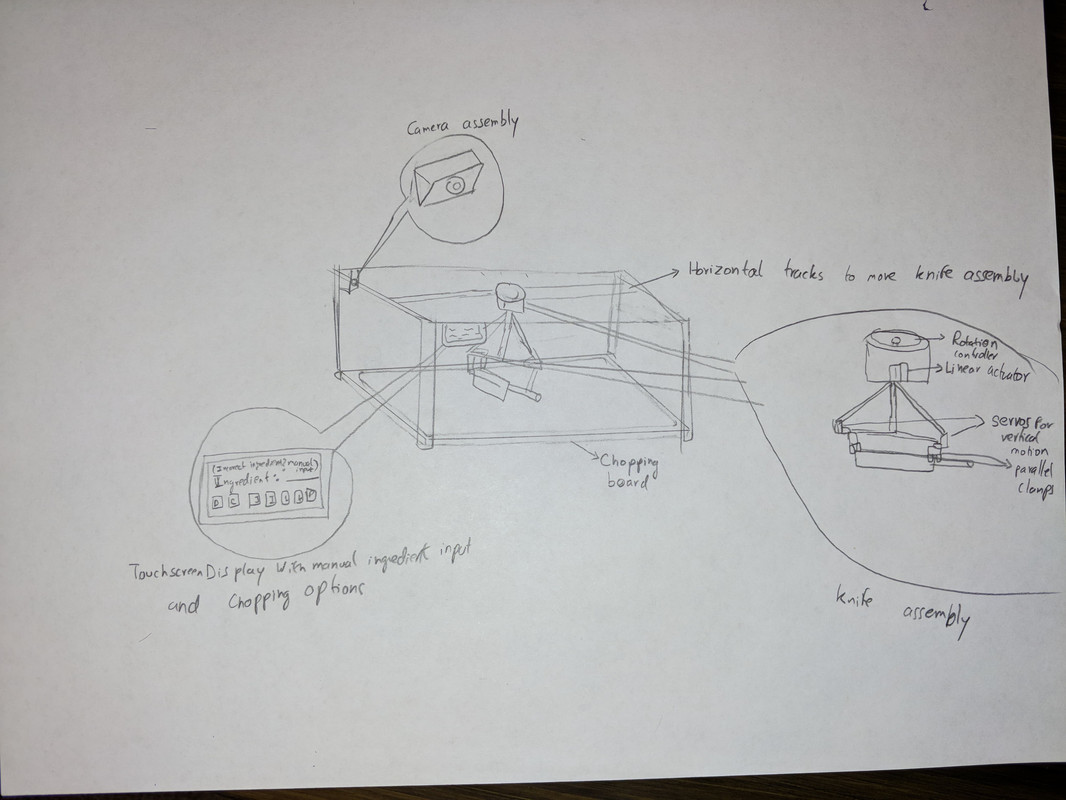](https://postimg.cc/s1YFGyw1) **Criterion for Success:** We will consider this project a success if we are able to build a housing that can be placed on top of a chopping board that recognizes the ingredient kept on the board and then subsequently suggests the different ways in which it can be cut, followed by telling the user what knife needs to be inserted into the assembly, subsequently automatically cutting the ingredients in the desired manner for the users, in a safe and hygienic manner. To consider this assembly successful, we would like for it to be able to recognize and differentiate between 10 common vegetables - Potatoes, Tomatoes, Onions, Carrots, Broccoli, Bell Peppers, Lettuce, Cucumbers, Mushrooms, and Cabbage (https://www.pma.com/content/articles/2017/05/top-20-fruits-and-vegetables-sold-in-the-us), subsequently correctly suggesting and chopping the vegetables in at least 8 different ways - Large Dice, Medium Dice, Small Dice, Pont-Neuf, Batonnet, Julienne, Brunoise and Paysanne. Within these cuts we would like the project to be within 75% of the size requirements as defined in french cooking (https://en.wikipedia.org/wiki/List_of_culinary_knife_cuts#:~:text=Large%20dice%20(%22Carr%C3%A9%22%20meaning,%E2%81%848%20inch%20(3%20mm). |
|||||