| Name | NetID | Section |
|---|---|---|
| Huihan Yan | huihany2 | ECE 110 |
| Krish Naik Aparaj | krishn2 | ECE 120 |
| Atharv Koshti | koshti2 | ECE 120 |
| Rohan Harpalani | rohanhh2 | ECE 110 and 120 |
| Constantin Legras | clegras2 | ECE 110 |
| Xingzhi Ma | xingzhi5 | ECE 120 |
Statement of Purpose
In the automobile industry today, there have been many technological advancements when it comes to further developing and strengthening a car's safety system. In many cars today, there are a lot of cameras to help people increase their visibility when driving, parking, and maneuvering through tight turns. In our case, we decided to focus specifically on crash detections systems in cars and tried to build a very simple version of it. The main purpose of this project is to design and produce a remote-controlled car and implement an anti-crash system. The team can get better understanding of electrical engineering by using various types of electronic components form suppliers such as Arduino, ultrasonic sensors, and motors. While the RC racing cars have a high power rating, it is very easy to cause serious damage if they crash into the wall with high speed. To prevent this from happening, an anti-crashing system based on the usage of ultrasonic sensors will be built on the car to cut off the power supply when there is obstacle in front of the car, which can be used to prevent the crash or reduce the damage caused by crash. Our goals is to successfully build and code an anti-crash system on a car using an ultrasonic sensor and test it in front of obstacles. We want to be able to make our car stop when it detects an object or obstacle within a certain distance.
Background Research
This project will help the team learn about fundamental design in a RC car while give the user more control over the car. Furthermore, remote control cars can reach high speeds and therefore be quite dangerous, so it was important to us to implement a safety system to prevent accidents. Also, a crash detection system, which is based on an ultrasonic sensor, will be implemented on the car. The sensor is expected to detect walls, people, and any potential obstacles that may impact the car during its motion. If the car approaches an obstacle at a certain distance, it will automatically cut the power supply to make sure the car and its surroundings are safe.
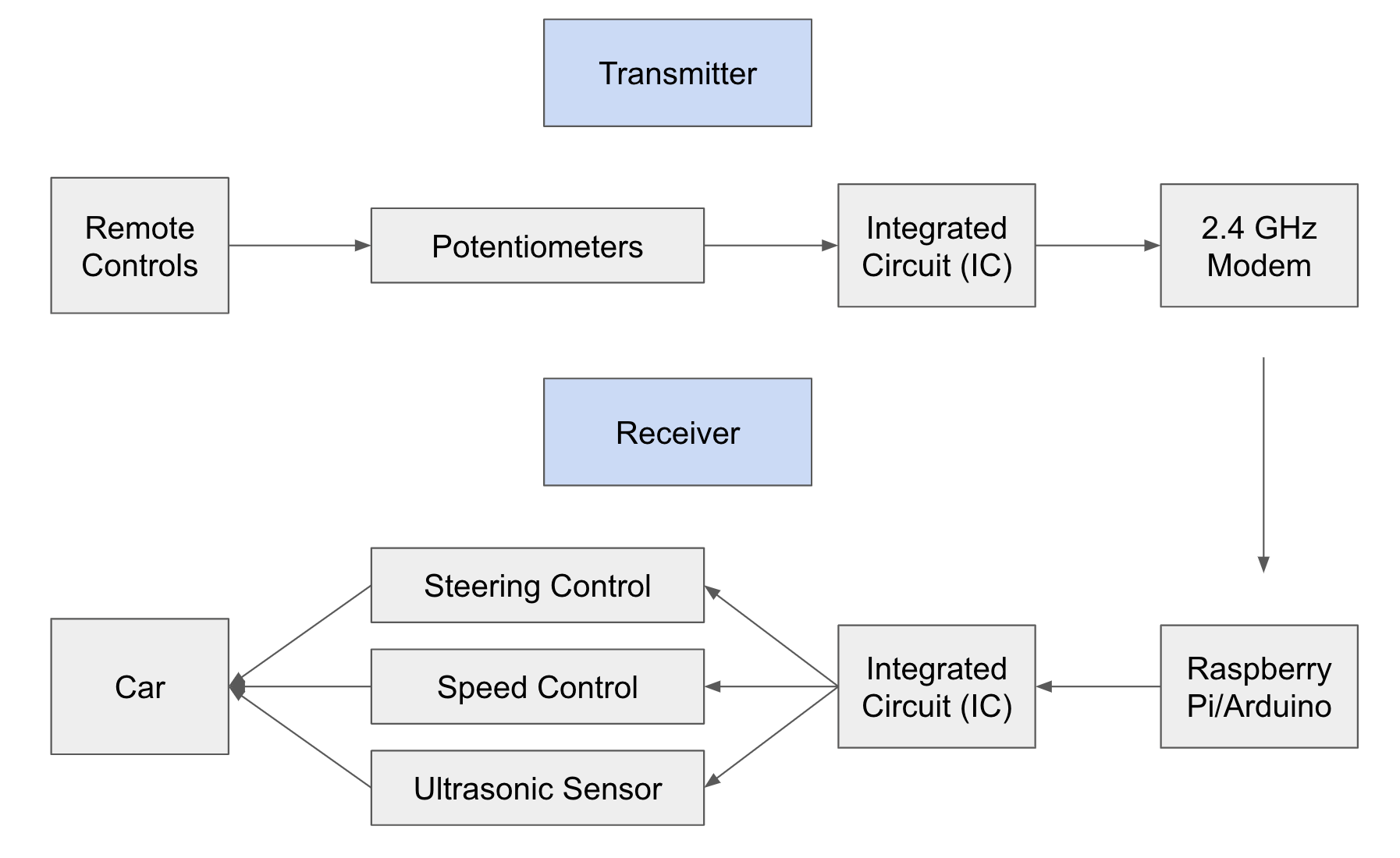
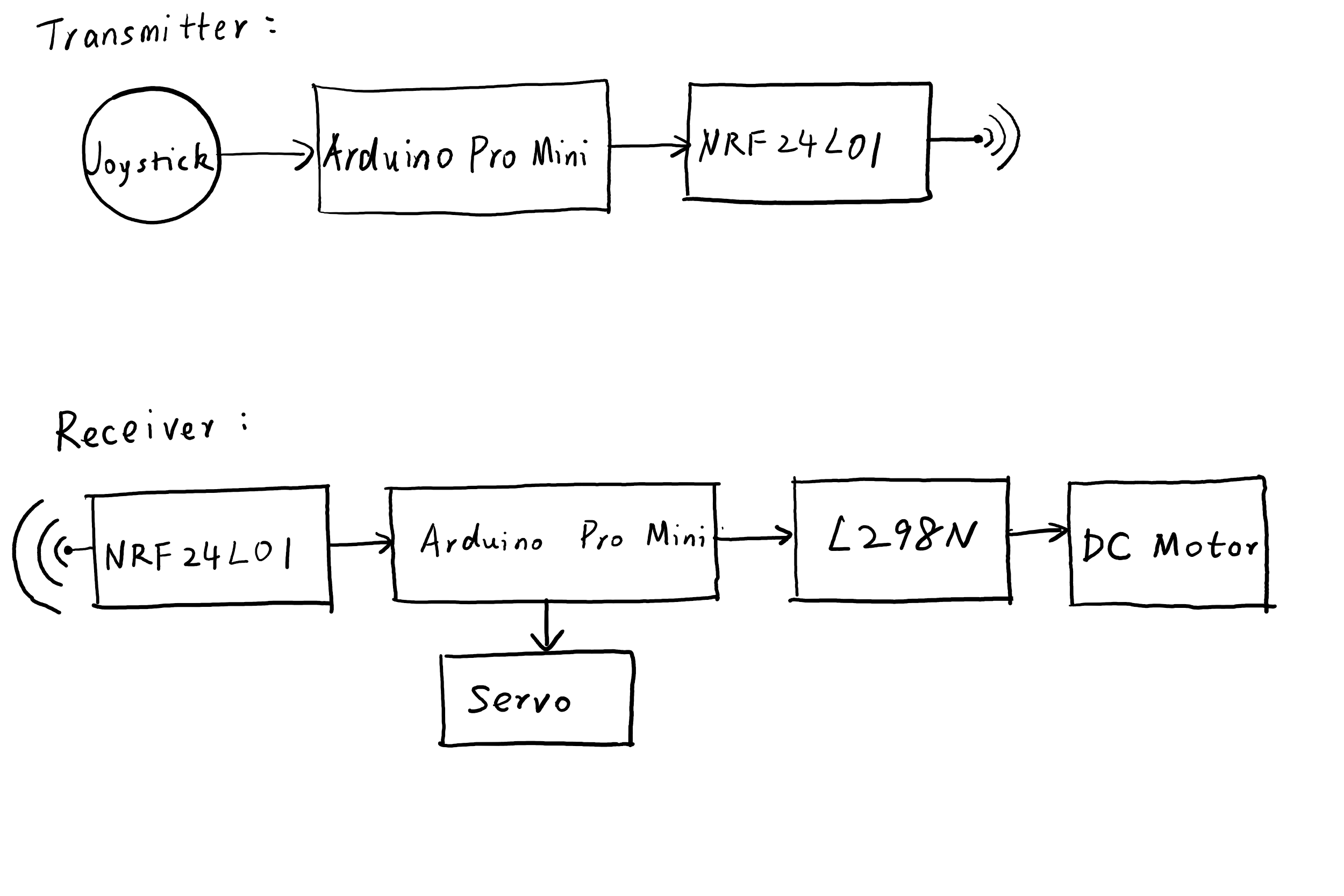
Block Diagram / Flow Chart
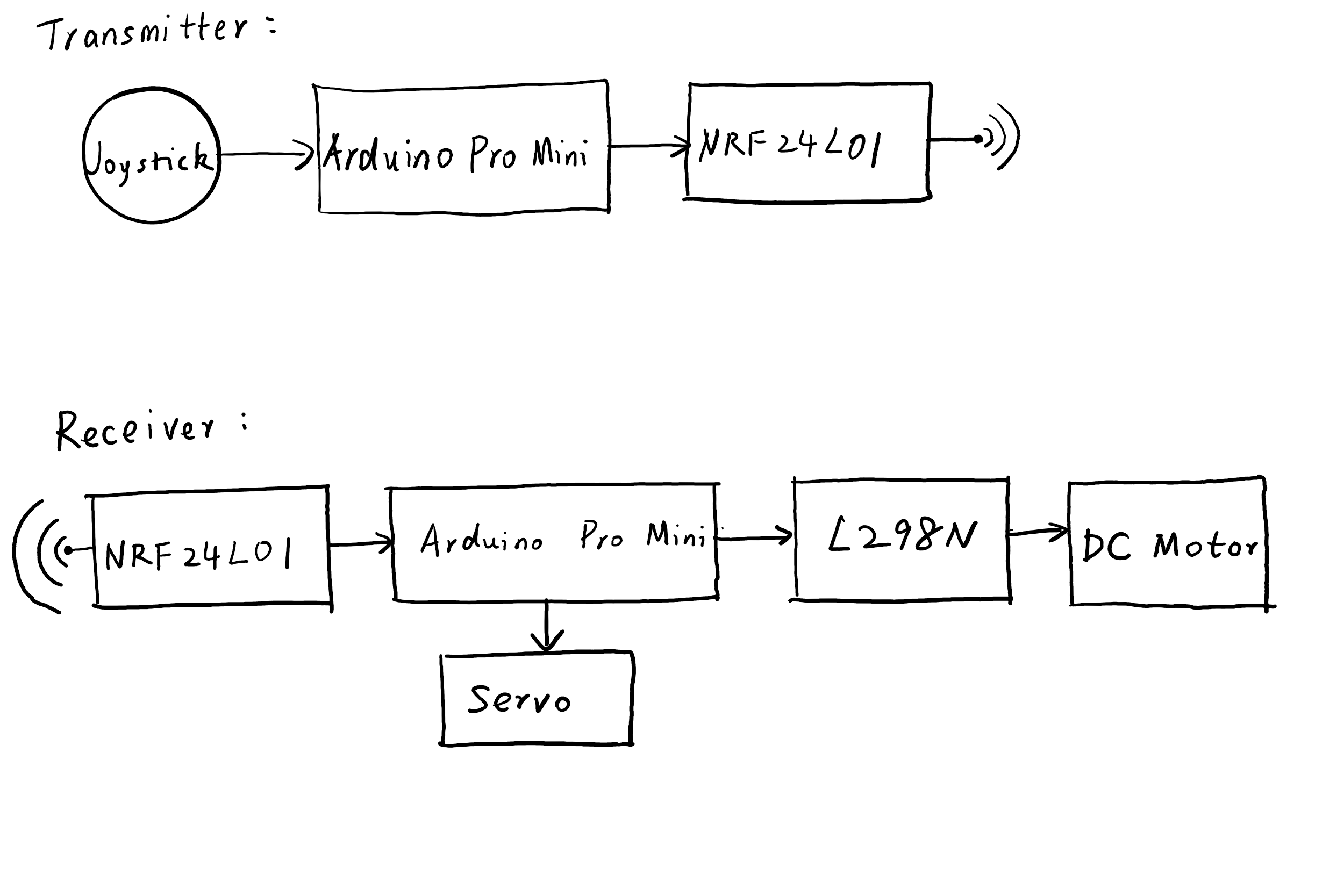
System Overview
| Block | Purpose |
|---|---|
| Remote Controls | 3D printed remote control to allow user input. |
| Potentiometers | Potentiometers in the remote's joysticks allow for precise controlling of speed and steering. |
| Integrated Circuit | Allows for the potentiometer input to be converted into useable signals for the car. |
| 2.4 GHz Modem | Sends controls from the remote to the car over 2.4 GHz radio frequency. |
| Raspberry Pi/Arduino | Receives signals from the remote and translates them to the car. |
| Steering Control | Adjusts steering according to input from the remote's |
| Speed Control | Adjusts speed according to input from the remote's potentiometer. |
| Ultrasonic Sensor | Detects any obstacles using emitted ultrasonic waves and adjusts course accordingly. |
| Car | Finalized RC car to be controlled with motors. |
Parts
Provide a list of parts that you may need for your project. You should include details such as the quantity, model number, purpose, vendor, and price (excluding taxes and shipping) for each part. This list may change as you work on your project.
| Block | Website |
|---|---|
| Chassis | 3D printed (No website) |
| Arduino Pro Mini | |
| L298N | |
| NRF24L01 | Already bought. |
| Motors | https://my.ece.illinois.edu/storeroom/catalog.asp |
| Wheels | https://my.ece.illinois.edu/storeroom/catalog.asp |
| Ultrasonic Sensors | https://my.ece.illinois.edu/storeroom/catalog.asp |
| Raspberry Pi/Arduino | Already bought. |
| 2.4 GHz Modem | https://www.digikey.com/en/products/detail/adafruit-industries-llc/2491/5761206?utm_adgroup=RF%20Transceiver%20Modules&utm_source=google&utm_medium=cpc&utm_campaign=Shopping_Product_RF%2FIF%20and%20RFID_NEW&utm_term=&utm_content=RF%20Transceiver%20Modules&gclid=Cj0KCQiA4L2BBhCvARIsAO0SBdZ1089Pxk1igs3f2oLYzJTEdbbht_dFHRW2MNXk6in_4qW1REwu0NUaAgYAEALw_wcB |
| Battery | https://www.amazon.com/Energizer-Alkaline-General-Purpose-Battery/dp/B00003IE4E/ref=sr_1_10?dchild=1&keywords=9v+battery&qid=1613766619&s=hpc&sr=1-10 |
| Potentiometer | https://my.ece.illinois.edu/storeroom/catalog.asp |
Possible Challenges
Turning with the potentiometer might be a problem since the team is not sure on how to implement this yet. Setting up a wireless connection to connect the car with a remote and modem might be also difficult. Designing the body and the remote may be troublesome as well due to the lack of design experience in CAD software, especially with the expectation to 3D print the designs later.
In addition, due to the fact that some group members are currently international and in different time zones, working on this hardware project remotely may present some difficulties.
Report and Presentation
Link to the presentation video: https://drive.google.com/file/d/1jE07yBMXqmlhoyMAKqyXTiWBDYhWdCW4/view?usp=sharing
References
[1] "RC Car Schematics", People.ece.cornell.edu, 2021. [Online]. Available: https://people.ece.cornell.edu/land/courses/ece4760/FinalProjects/s1999/blair/Schematics.html. [Accessed: 19- Feb- 2021].
[2] Linus Tech Tips, First Person View VR RC Car Racing. 2021. [Online]. Available: https://www.youtube.com/watch?v=Q80oCX629xE. [Accessed 4- Apr- 2021].
[3] M. Aqib, "High Speed Arduino RC car", Arduino Project Hub, 2021. [Online]. Available: https://create.arduino.cc/projecthub/muhammad-aqib/high-speed-arduino-rc-car-5c2a3d. [Accessed: 19- Feb- 2021].
[4] Dejan, “Arduino DC motor control tutorial – L298N | PWM | H-Bridge”. How to Mechatronics. n.d. [online]. https://howtomechatronics.com/tutorials/arduino/arduino-dc-motor-control-tutorial-l298n-pwm-h-bridge/ [Accessed May 4, 2021].
[5] Dejan, “DIY Arduino RC receiver for RC models and Arduino projects”. How to Mechatronics. n.d. [online]. https://howtomechatronics.com/projects/diy-arduino-rc-receiver/#:~:text=Nevertheless%2C%20the%20brain%20of%20this,connect%20from%206%20to%2012V [Accessed May 4, 2021].
[6] Dejan, “DIY Arduino RC transmitter”. How to Mechatronics. n.d. [online]. https://howtomechatronics.com/projects/diy-arduino-rc-transmitter/ [Accessed May 4, 2021].
[7] Just Do Electronics, “NRF Based Servo Motor Control”. Just Do Electronics. 2020. [online]. https://www.prateeks.in/2020/05/nrf-based-servo-motor-control.html [Accessed May 4, 2021].
{kind=link}
{kind=link}