In the last lecture we talked about using the Laplace transform to solve convolutions, ODEs, and IVPs and along the way we encountered partial fraction expansions. In this lecture we take a detailed look at second order systems and associated theory along with an applet/demonstration. Finally we will also start our introduction to Simulink.
Recall that the prototypical second order system is represented by the transfer function:
H(s)=s2+2ζωns+ωn2ωn2,
where
ζ is a non-negative and ωn is strictly positive and are called the damping ration and natural frequency respectively;
the denominator is a general second degree monic polynomial;
H(s) is normalized so that H(s=0)=1.
By the quadratic formula we get that the denominator has roots (called poles):
s=−ζωn±ωnζ2−1
Therefore the nature of the poles depend on ζ.
if ζ>1, both poles are real and negative - called overdamped
if ζ=1 then there are two repeated real negative poles - called critically damped
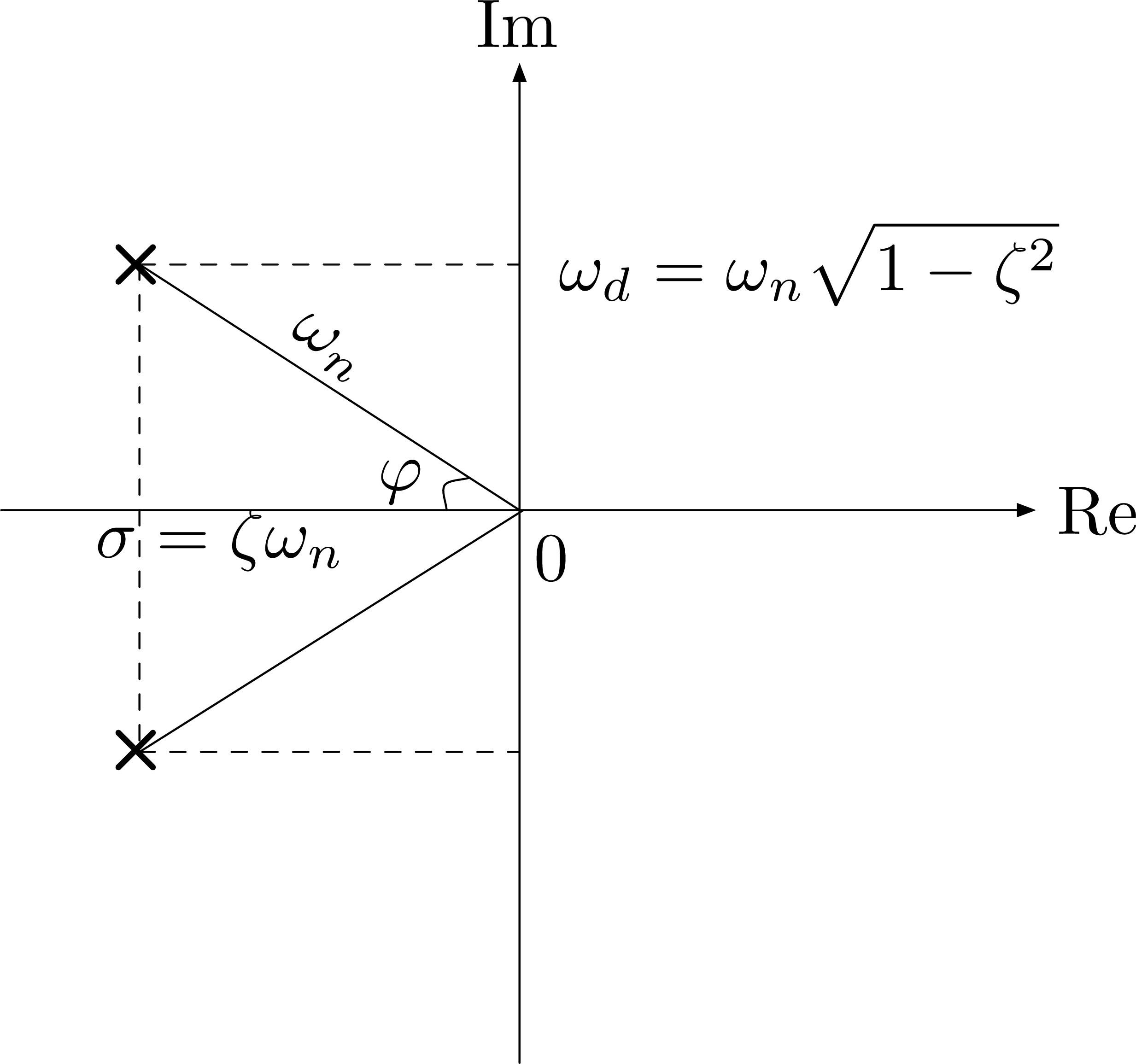
if ζ<1 then there are two complex poles with negative real parts s=−σ±jωd where σ=ζωn and ωd=ωn1−ζ2 - called the underdamped case
Let us consider the underdamped case. For the underdamped system the roots are:
s=−ζωn±jωn1−ζ2=−σ±jωd
we can plot the complex valued poles in the complex plane as follows:
If we compute the time domain system response to an impulse we get:
h(t)=L−1{H(s)}(by definition of transfer function)=L−1{s2+2ζωns+ωn2ωn2}=L−1{(s+σ)2+ωd2ωn2}(by the above underdamped poles)=L−1{(s+σ)2+ωd2(ωn2/ωd)ωd}=ωdωn2e−σtsin(ωdt)(by transform tables)
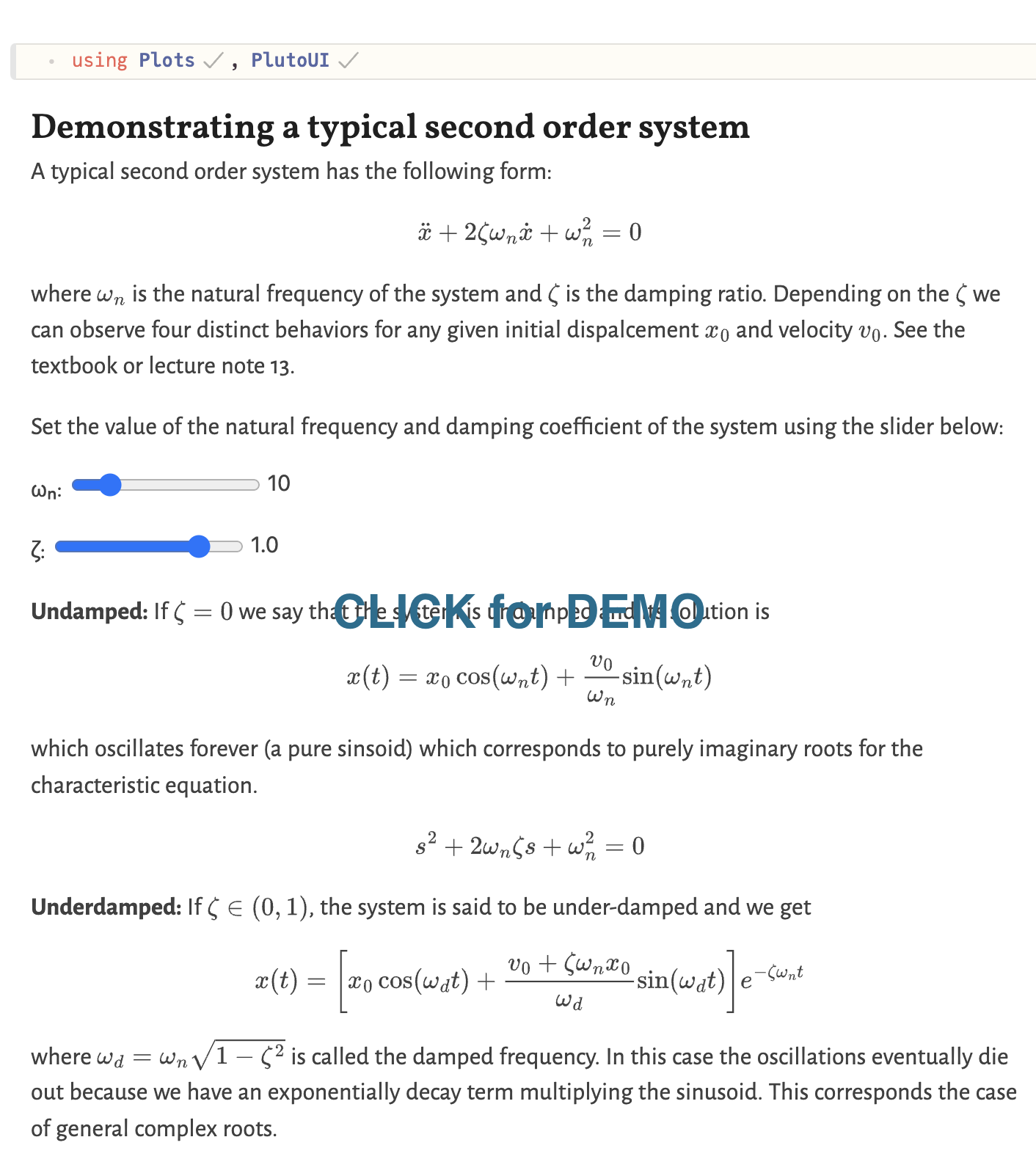
The demonstration below (click to go there) allows you to visualize the system response for different values of ζ. From here we see that, the decaying rate of the exponential in step response depends on the real part of the pair of complex poles, i.e. −σ=−ζωn whereas the imaginary part determines how the step response oscillates while it decays. This is the reason for calling ωd=ωn1−ζ2 the damped natural frequency. The other cases are also discussed in detail in the demonstration.