ECE 486 Final Project:
The Reaction Wheel Pendulum
General Overview
Introduction
 The final project is a somewhat structured project that guides you
through mathematical modeling, friction analysis, and controller
design of the Reaction Wheel Pendulum (RWP) using the tools you
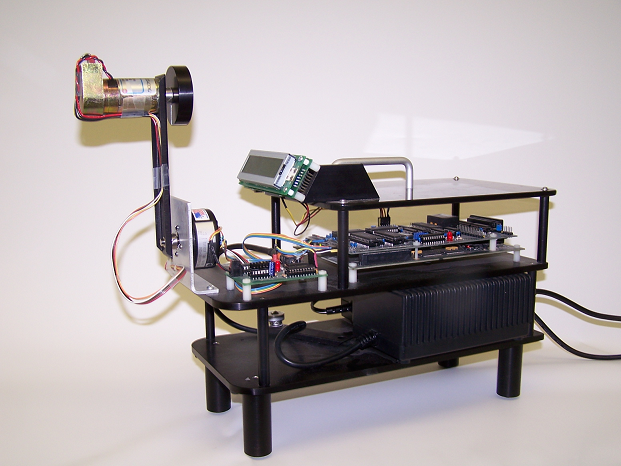
have gained in ECE 486. The RWP is a variant of the inverted pendulum
control problem that uses the reacting torque from a turning wheel to
stabilize in an unstable equilibrium position.
The final project is a somewhat structured project that guides you
through mathematical modeling, friction analysis, and controller
design of the Reaction Wheel Pendulum (RWP) using the tools you
have gained in ECE 486. The RWP is a variant of the inverted pendulum
control problem that uses the reacting torque from a turning wheel to
stabilize in an unstable equilibrium position.
Structure is provided by the packet available on the course website. However, the four lab sessions which you will be given to work on the final project will not be structured (although a guideline is provided below). We encourage you to work at your own pace, to come in outside of lab hours, and to spend extra time working with the RWP.
Report
Week 1
Dan Block will be giving a demonstration of the RWP in lecture this week. Copies of the final project handout will be made available in lecture at that time. Both A and B teams will meet in the lab simultaneously. You should have read through Sections I and II and Appendix A.
Also we strongly encourage you to complete (or at least try to complete) Section I before coming to lab. It consists of the mathematical derivation of the dynamics. It is straightforward, but may take some time, and it provides an excellent introduction to the RWP. In the lab you will be setting up the Lagrange dynamical equations for the RWP and calculating the friction torque profile for the reaction wheel itself.
Timeline
- Final Project Week 1
- There is no prelab due this week
- Introduction / system derivation
- Velocity estimation, friction ID, friction compensation
- Lab 6 - A Teams
- Lab 6 - B Teams
- Final Project Week 2
- System ID
- Start of state-space controller design
- Final Project Week 3
- Finish state-space controller design
- Design of observer
- Final Project Week 4
- Finish up / report / optional sections
Grading Overview
250 pts distributed among:
- (15 pts) prelab for Final Project, due Week 2
- (35 pts) demo for Part II (friction compensation)
- (35 pts) demo for Part IV (stabilization using 3-state feedback)
- (35 pts) demo for Part V (stabilization using observer-based controller)
- (35 pts) (extra credit)demo for Part VI and VII, optional.
- (130 pts) report - one report per group
Demonstrations
To ensure that you are making progress, we will ask you to demonstrate your final project at various milestones. You should demo during either TA office hours or lab meeting times. The only time constraint for the demos is that you must demo Part II by the end of the second week of final project (you will have 3 weeks, because Lab 6 comes between the first and second weeks of final project).
- Part II demo This will be very similar to the Lab 5 demo of friction compensation. We want to see the motor spinning "frictionlessly".
- Part IV demo You will use 3-state feedback to design a controller in Wincon. We want to see this controller running, and its robustness with respect to disturbances.
- Part V demo We will use observer design to make a 3-state controller in Wincon. We want to see this controller running, and its robustness with respect to disturbances.
Report
Report guidelines

 Website design by Tansu Alpcan.
Website design by Tansu Alpcan.