ECE448/CS440 Spring 2022Assignment 6: Reinforcement LearningDue date: Monday May 2nd, 11:59pm (We will accept late submissions up till 16th May, 11:59pm) |
Starter code
You can download the starter code here: zip, tar
Run the main functions of "tabluar.py" and "dqn.py" to train your RL model. Then run "mp6.py" to run/test the resulting model. Note that "mp6.py" is not that important. It's only there to help you see how your model performs
General guidelines
Basic instructions are similar to previous MPs: For general instructions, see the main MP page and the course policies.
Code will be submitted on gradescope.
The extra credit portion will be submitted separately on gradescope. In your MP average, the extra credit is worth 10% of the value of the regular part of the assignment.
Objective
Create an RL agent to do cool things, like balancing a pole or swinging a multi-pendulum as high as possible.
Our RL agent will be implemented via Q-Learning in the tabular setting and function approximation setting
Environment - CartPole V1
In the CartPole environment, there is a pole standing up on top of a cart. The goal is to balance this pole by moving the cart from side to side to keep the pole balanced upright. A reward of +1 is provided for every timestep that the pole remains upright, and the episode ends when the pole is more than 15 degrees from vertical, or the cart moves more than 2.4 units from the center.
Observation space
| Index | Meaning | Min | Max |
|---|---|---|---|
| 0 | Cart Position | -4.8 |
4.8 |
| 1 | Cart Velocity | -Inf |
Inf |
| 2 | Pole Angle | -24 deg |
24 deg |
| 3 | Pole Tip Velocity | -Inf |
Inf |
Action Space
- 0 - Left
- 1 - Right
High Level Algorithm
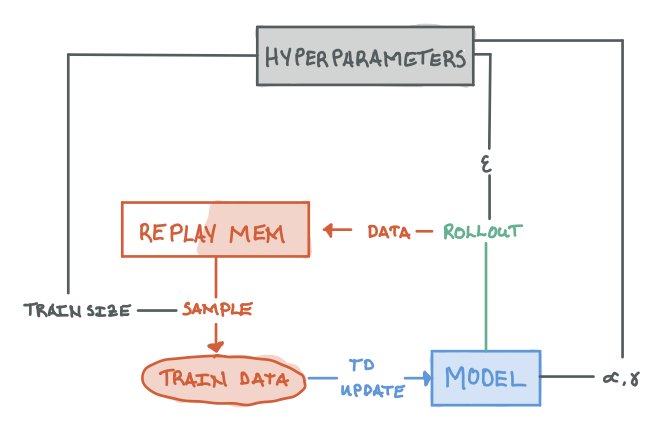
- Initialize Model
- Rollout trajectories using current model and store it into the replay memory
- Sample data from the replay memory to update the model's Q-value estimates
- Repeat steps 2-4 until convergence
Your Job
Implement the initialization and training code of Q-learning for the tabular setting.
Most of the code is written for you, you just have to fill out some functions
Rollout
Implement the rollout function in utils.py. This function plays a given number of episodes and returns the replay memory and score.
The replay memory is a list of (state, action, reward, next_state, done) at each timestep for all episodes, and score is a list of total rewards for each episodes.
We use the replay memory in our train function in utils.py.
During training, the agent samples data randomly from the replay memory to reduce the strong temporal relationship between consecutive pair of (state, action, reward, next_state, done).
Tabular Setting
- Implement the following functions of
TabQPolicyintabular.py- Initialization
__init__: create the table to hold the Q-vals. qvals: given the current state, return the value for each action.td_step: look below for the description of temporal difference learning.
- Initialization
- Tune the discretization in main call of
tabular.py- The state space for this environment is continuous. We have provided a function for discretizing the state space
into bins for you. You just have to choose the granularity of division by tuning the
bucketsargument. The model takes as input - bins, which denotes the number of distinct bins for each dimension of the state space.
- The state space for this environment is continuous. We have provided a function for discretizing the state space
into bins for you. You just have to choose the granularity of division by tuning the
Training: Temporal Difference
You have to implement the td_step function in tabular.py.
The function takes in training data of the form state, action, reward, next_state, terminal (done).
Recall the TD update for Q-vals is
\(Q(s,a) \leftarrow Q(s,a) + \alpha \cdot (\textit{target} - Q(s,a))\)where \(\textit{target} = r + \gamma \cdot \max_{a'}Q(s',a')\) if the state is not terminal and \(\textit{target} = r\) otherwise.
Return the square error of the original q-value estimate, i.e. the
square of the difference between that and target.
Hyperparameter Tuning
A large part of this assignment is tuning the hyperparameters to train a good model.
See the hyperparameters function in the utils.py script to see what parameters you can control.
Extra Credit: Function Approximation Setting
In this extra credit part, you need to run DQN policy on CartPole-v1. You have to create a neural network that takes the state as input, and output the score for each action. The state is no longer discrete as in the tabular setting.
- Implement the following functions of
DQNPolicyindqn.py- Initialization
__init__: create optimizer and loss td_step: temporal difference learing update
- Initialization
- Implement
make_dqn- This defines your neural network. You have the creative freedom to make it however you want as long as
the returned object is a PyTorch
nn.Module. Please make sure that your model can be trained and evaluated on a CPU.
- This defines your neural network. You have the creative freedom to make it however you want as long as
the returned object is a PyTorch
Submission
You need to train and submit your models on gradescope. First, adjust/tune your parameters as needed in utils.py and the granularity of your Q-table in the bottom of tabular.py. The same set of hyperparameters does not necessarily work well for both Q learning and DQN simultaneously. Then, train your Q learning agent by running python tabular.py and your DQN agent with python dqn.py. At completion, the model will be saved to tabular.npy and dqn.model for Q learning and DQN respectively.
You can view the performance of your agents with python mp6.py --model <saved_model.file> --episodes 8 --epsilon 0
- For tabular Q learning, submit
tabular.pyand your trained modeltabular.npyon gradescope. - If you do the extra credit, submit your
dqn.pyand the trained modeldqn.modelto the separate extra credit assignment on gradescope.
Expected Scores
- For tabular Q learning,
python mp6.py --model tabular.npy --episodes 8 --epsilon 0should yield 200+ score. - If you do the extra credit,
python mp6.py --model dqn.model --episodes 8 --epsilon 0should yield 300+ score.
You don't need to submit utils.py to the gradescope.
Package Requirements
This assignment requires some Python packages
gym- RL environmentnumpy- numerical analysis packagetqdm- progress bars