| Name | NetID | Section |
|---|---|---|
| V Verma | vverm2 | ECE 120 |
| Alyssa Huang | azh4 | ECE 110 |
Statement of Purpose
The purpose of our project is to create a robotic hand that can be controlled wirelessly through a controller glove that the user must wear. The robotic hand will be mounted to and not able to rotate however will ideally have full range of motion on its fingers while the user wears a glove outfitted with an array of sensors that detect the motion of the user's hand and sends it to the robotic hand, which will ideally replicate it exactly.
Background Research
After doing research, we weren't able to find any previous projects similar to our own. Our project was inspired by a TikTok showing an amputee's prosthetic arm. We hope projects like ours will contribute to future drone, prosthetic, and avatar technologies that will aid humans in medical fields, disaster relief, and military fields.
Block Diagram / Flow Chart
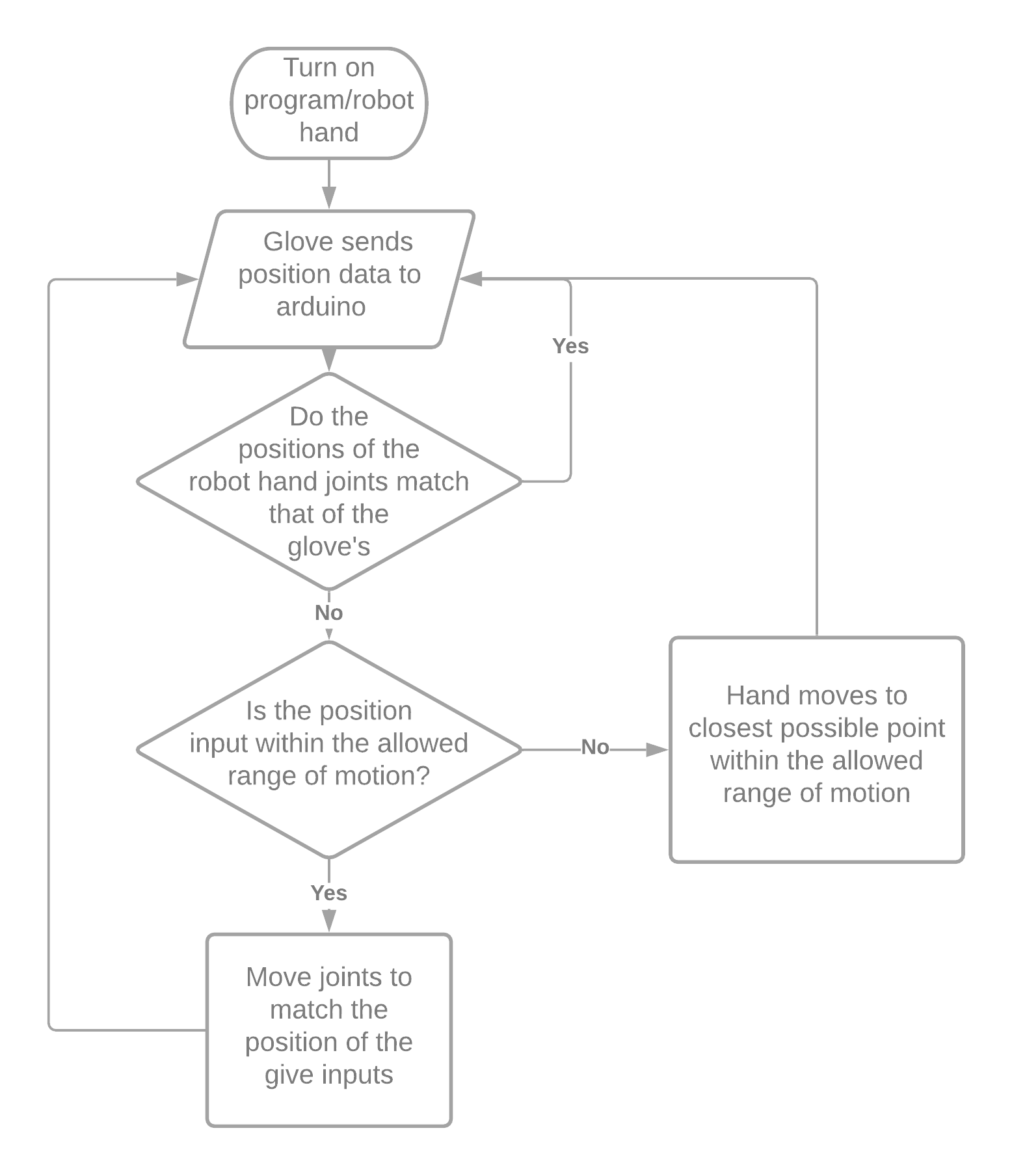
System Overview
Provide descriptions to your block diagram and flow chart. State the purpose of each block.
Parts
| Material | Quantity | Vendor | Price | Total Price |
|---|---|---|---|---|
| Flex Sensors | 5 | Sparkfun | 15.95 | 79.75 |
| Servo Controller | 1 | Adafruit | 14.95 | 14.95 |
| Arduino Uno | 1 | ECE Honors Lab Supply | 18.66 | 18.66 |
| Arduino Nano | 1 | ECE Honors Lab Supply | 10.00 | 10.00 |
| 3v Servo Motors | 5 | ECE Eshop | 0 | 0 |
| Cardstock | a lot | n/a | 0 | 0 |
| Scoth Tape | 1 roll | n/a | 0 | 0 |
| String | 5 string | n/a | 0 | 0 |
| Carboard | a lot | n/a | 0 | 0 |
| Glove(s) | 1 | Walmart | 10.45 | 10.45 |
| Total | $133.81 |
Possible Challenges
- Issues with having the person wearing the controller glove having a limited range of motion
- Trouble transmitting the data from the controller glove to the robotic hand
- Cost
- Capactiance measurement
- Sending data via bluetooth
References
Wevolver.com. [online] Available at: <https://www.wevolver.com/article/soft.and.stretchy.fabricbased.sensors.for.wearable.robots> [Accessed 23 September 2021].
Softroboticstoolkit.com. Case Study. [online] Available at: <https://softroboticstoolkit.com/tshs-case-study> [Accessed 20 September 2021].
LIU, R., SHAO, Q., WANG, S., RU, C., BALKCOM, D. and ZHOU, X., 2019. Reconstructing Human Joint Motion with Computational Fabrics. [ebook] Association for Computing Machinery. Available at: <https://www.cs.dartmouth.edu/~xia/papers/ubicomp19-fabric.pdf> [Accessed 23 September 2021].
Straw Fingers | DIY for Beginners | KiwiCo. KiwiCo. (2021). Retrieved 23 September 2021, from https://www.kiwico.com/diy/stem/motion-mechanics/straw-fingers.
Softroboticstoolkit.com. Textile Silicone Hybrid Sensor Fabrication Guide. [online] Available at: <https://softroboticstoolkit.com/resources-for-educators/tsh-sensor> [Accessed 20 September 2021].