Taiqing Ling, taiqing2 (ECE110)
Yiyang Nan, yiyangn2 (ECE110)
Chenghao Lu, clu19 (ECE120)
Introduction
Propose:
- Designing and building a hand gesture controlled robot, which is wireless and will be able to follow at least four hand-gesture instructions to move freely in the four directions of the horizontal plane. The user will basically wear a glove on their intructing hand, on which an accelerometer will read the gesture instuctions and then through wireless connection, signals are sent to the motor driver to drive the robot.
- Trying to add a mechanical arm, which is also wireless and will copy exactly the same movement as the controller's arm.
Background Research
- Motion sensing is more and more widley used in video games, like the famous Xbox and Wii. The idea of making a hand gesture controlled robot is partially inspired from our love of motion sensing games. Another stimiulus for this idea is that in the past we saw a video of bionic hand on Youtube, in which the mechanic hand could could perfectly imitate the motion of a person's hand. To make it more practial to us, we simplify the gesture control to a chassis, unlike a bionic hand, instead of analog reading the degree of inflxion in each finger, we just have to test True/False of a motion. And for the part of mechanic arm, we will only need two servos to control the arthosis, the shoulder and elbow, which makes the project not that time costing as the bionic hand. In the future, our idea can be extended to make the chassis a real "puppet", that is a human figured robot, which will be really cool.
Design
System overview
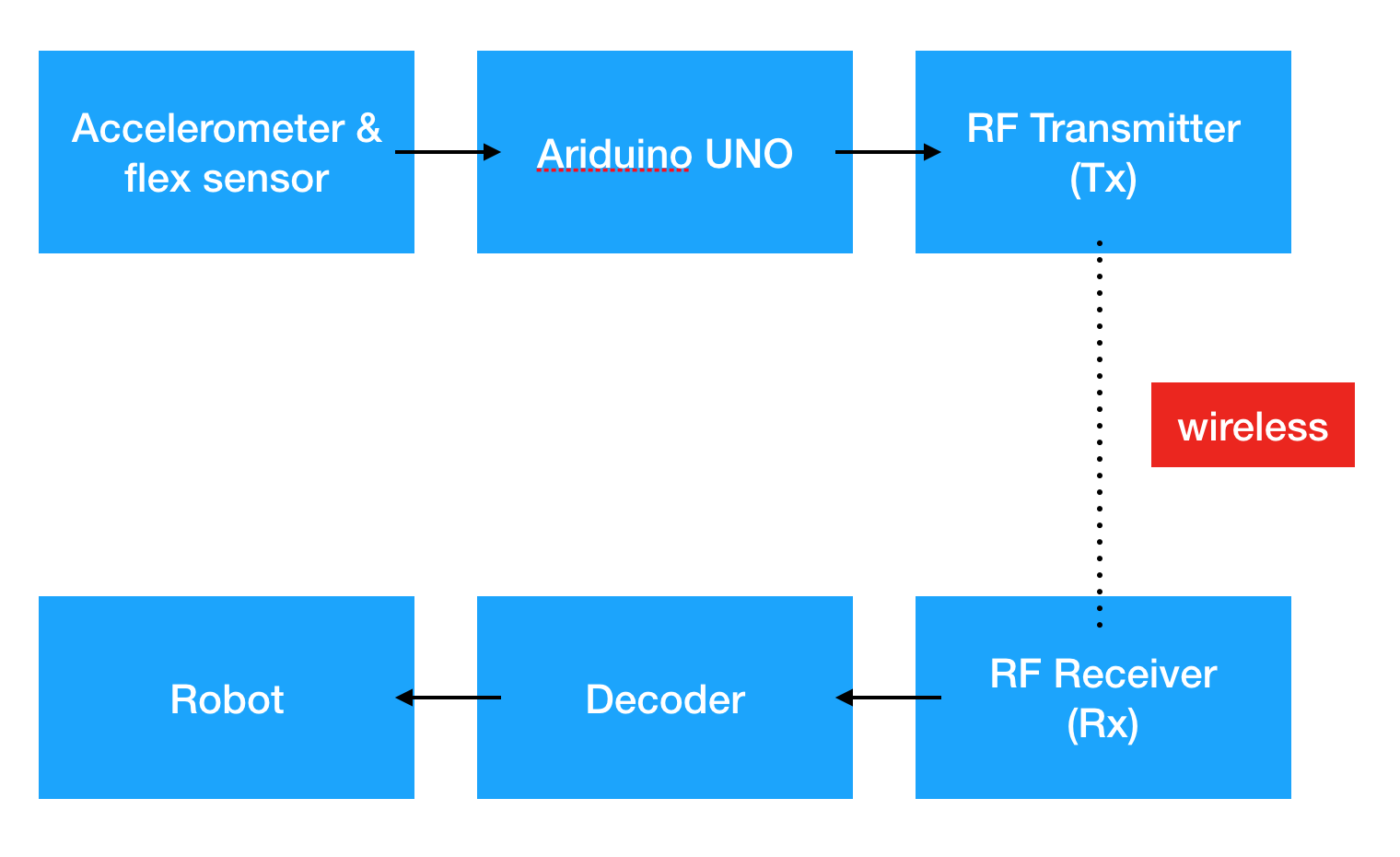
- Accelerometer ADXL335: being placed on the controller's hand to detect the gestures
- flex sensor: to detect the gesture given by the controller's arm, also to meet the ECE 110 requirement
- Arduino uno: logics will be added to the anolog data read from the accelerometer to give instructions
- RF 433M Module: for wireless connection bettwen the arduino and the robot
- decoder: to decode the data recerived from the RF receiver and give order to the robot, also to meet the ECE120 requirement
Flow Chart
Sample gestures
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Part list:
wheels
DC motors
H bridge
servo
accelerometer ADXL335
flex sensor
Arduino UNO
RF 433MHz
2:4 decoder
Challenges:
Encoding and decoding of the gesture instructions
Wireless conncection
Relactive calculation about the logic on intepreting the flex sensor
References
https://create.arduino.cc/projecthub/user206876468/hand-gesture-controlled-robot-4d7587
{kind=link}