Bryson Wall - bewall2 - ECE 120
Jess Herr - jjherr2 - ECE 120
Matthew Lim - mlim29 - ECE110
Abby Mohan - ammohan2 - ECE 110
Statement of Purpose
Our goal is to make a small submarine capable of moving in multiple directions and controlled through wireless remote through bluetooth. The submarine will be able to turn on a light if a photo sensor senses the absence of surrounding light. Goals for the project would be creating the casing and the motor mechanisms to propel the submarine. Also, using Arduinos and circuits to create the wireless remote and the inner electronics of the submarine. The unique goal would be to not only wirelessly control the submersible, but also to create a device that would be able to be waterproof.
Background Research
We have looked at many types of submersible formats and structures as well as looking at different materials to make the submarine shell out of like PVC or acrylic pipes. We’ve looked into different motors and different Arduinos as well. Our motivation for this project is to use what we’ve learned in ECE 110 and 120 in order to make a functioning and sensing vehicle under the constraints of water. The concept of creating a small wirelessly controlled submarine can have many implications for future adaptations like adding a camera and lights in order to explore small underwater enclosures.Our project is unique in that it is made with the goal of interacting with water.
Example of an underwater sub: https://www.youtube.com/watch?v=f5mUe2oyuTU
Motors and Powering them: https://howtomechatronics.com/tutorials/arduino/arduino-dc-motor-control-tutorial-l298n-pwm-h-bridge/
Block Diagram/Flow Chart
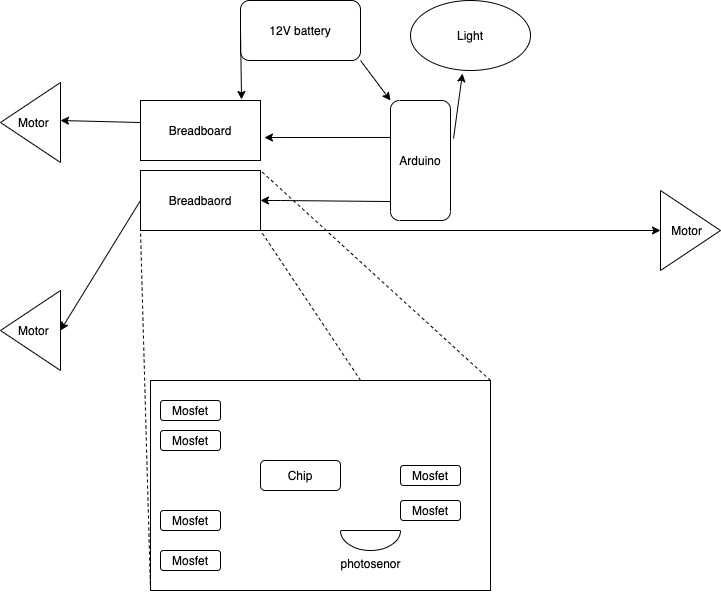
System Overview
- Motor - Motors will control how the submarine moves. The back two motors will control forward, backward, and side to side. The front motor will contribute to those, and also to up and down.
- Breadboard - Acts as the base of operations for the submarine. The power and control will flow through the breadboard
- 12V Battery - Powers the arduino and breadboard
- Light - Turns on when the submarine's environment is dark in order to illuminate the area around it (likely and LED)
- Arduino - Holds code that tells the motors what to do
- Mosfet - Helps power the motors
- Photosensor - Detects light changes, such as light deprivation, and allows current to flow to a light
- Chip - Controls the inputs and outputs that the motor goes through
Parts
FLEX SEAL CLEAR ($12.99) or Potting Epoxy ($29.58) –- Newark Electronics
2 ARDUINO NANO 33 BLE WITH HEADERS ($21.00) +
PVC/3D-Prints/Acrylic Pipes/Plastic Container? (For remote and for submarine shell) (Price Varies)
5 Motors (12 Volt DC Motor, 740mA, 0.091" Shaft Diameter -- Jameco Electronics ($3.49)
5 Plastic Propeller, 1/8" Shaft Size, 1-3/4" Blade Diameter -- Graves RC ($1.20)
5 Propeller Shaft Threaded Coupler, 4-40 Thread -- Graves RC ($2.25)
5 Threaded Insert Tee Nut, 4-40 Thread Size -- McMaster Carr ($11.43)
5 Nylon-Insert Hex Locknut 4-40 - Stainless Steel -- McMaster Carr ($3.61)
Jumper wires
10 Mosfets (Operating at least 12 volts and 740 mA) -- https://www.mouser.com/ProductDetail/Toshiba/SSM3J64CTCL3F?qs=u16ybLDytRaimdE8yeU5Iw%3D%3D ($2.79)
Photo sensor (~$1.00)
LED or other light source
2 HiLetgo HC-05 Wireless Bluetooth RF Transceiver Master Slave Integrated Bluetooth Module 6 Pin Wireless Serial Port Communication BT Module for Arduino -- Amazon ($7.99)
Silicone grease or Wax Bowl Ring -- Home Depot ($1.95)
Hot glue and other adhesives
- 2 Switches
- 3 Buttons
- 2-3 Breadboards
Possible Challenges
Preventing water from leaking inside the motors and the submarine
Creating a wireless remote
Creating a structure for the submarine that allows is to move in multiple directions using motors
Fixing or adjusting the speed of the motors
Handling the heat created
References
[1]"Underwater Vehicle Types", Dive & Discover, 2020. [Online]. Available: https://divediscover.whoi.edu/underwater-vehicles/three-types-of-vehicles/. [Accessed: 14- Feb- 2020].
[2]"SeaPerch Parts List", SeaPerch, 2020. [Online]. Available: https://www.seaperch.org/Parts_List. [Accessed: 14- Feb- 2020].
[3]"Arduino DC Motor Control Tutorial - L298N | PWM | H-Bridge - HowToMechatronics", HowToMechatronics, 2020. [Online]. Available: https://howtomechatronics.com/tutorials/arduino/arduino-dc-motor-control-tutorial-l298n-pwm-h-bridge/. [Accessed: 14- Feb- 2020].
[4]S. Brown, Arduino Bluetooth Submarine. YouTube: YouTube, 2020.
[5]"Arduino Remote/Wireless Programming and Homemade Power Bank", Arduino Project Hub, 2020. [Online]. Available: https://create.arduino.cc/projecthub/xreef/arduino-remote-wireless-programming-and-homemade-power-bank-c38bd1. [Accessed: 15- Feb- 2020].