| Name | NetID | Section |
|---|---|---|
| Kunal Sheth | kunal4 | ECE 110 |
Statement of Purpose
Please provide a brief description of your project. List the goals and objectives of your project and explain why this project is useful for the problem your group want to solve or functions that make your project unique.
This project is about creating an autonomous, single-wheeled, self-balancing robot capable of gracefully driving in any arbitrary path. My goals, in chronological order, include:
- Controlling front-to-back angle via drive wheel.
- Controlling side-to-side angle via reaction wheel.
- Calculating desired front-to-back angle, side-to-side angle, and drive wheel omega in order to turn in some given curvature.
- Recovering from reaction wheel saturation via drive wheel omega (generating centrifugal force to upright system).
- Dead reckoning position to an accuracy of ~1" per yard traveled.
- Motion profiling to drive in some given path without spilling a glass of water.
Background Research
Please provide details on the background research your group has done for your project. Explain what drives you to work on this project and/or why this project is important. Also include discussions on any similar projects your group have looked at in coming up with your project. How is your proposed project different or similar to those your group have looked at.
So far I've researched the classic "inverted pendulum on a cart" control problem, "reaction wheel inverted pendulum" systems, and the concepts of camber thrust / counter steering. These concepts are the foundations for how I plan to control the self-balancing unicycle. I will continue researching further into state-space representations and LQR control.
I've also been researching gyro-accelerometer sensor fusion techniques. However, I may instead opt for a COTS hardware-software solution as these tend to include more advanced drift compensation for factors like temperature. I don't want to spend too much time researching inertial measurement as I feel it is outside the scope of my project.
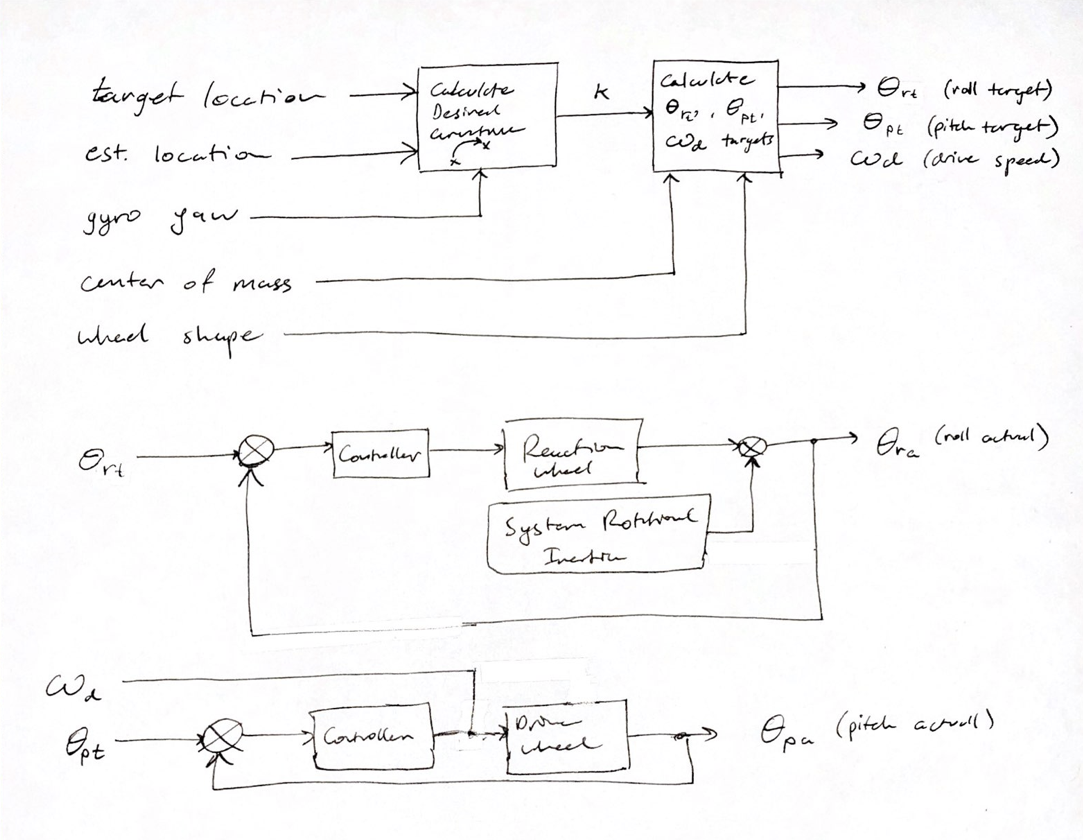
Block Diagram / Flow Chart
Electronics:

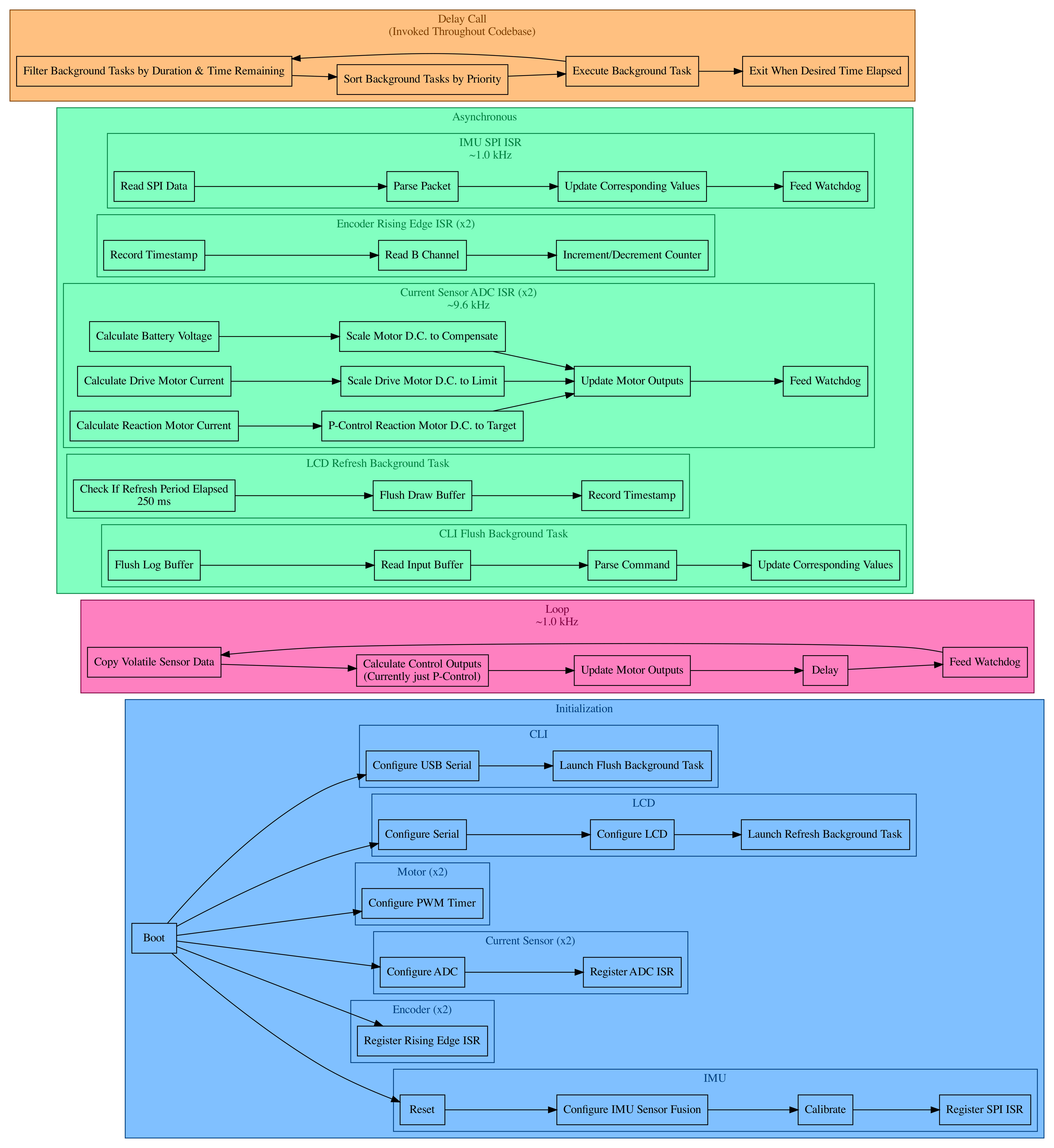
Software:

System Overview
Electronics:
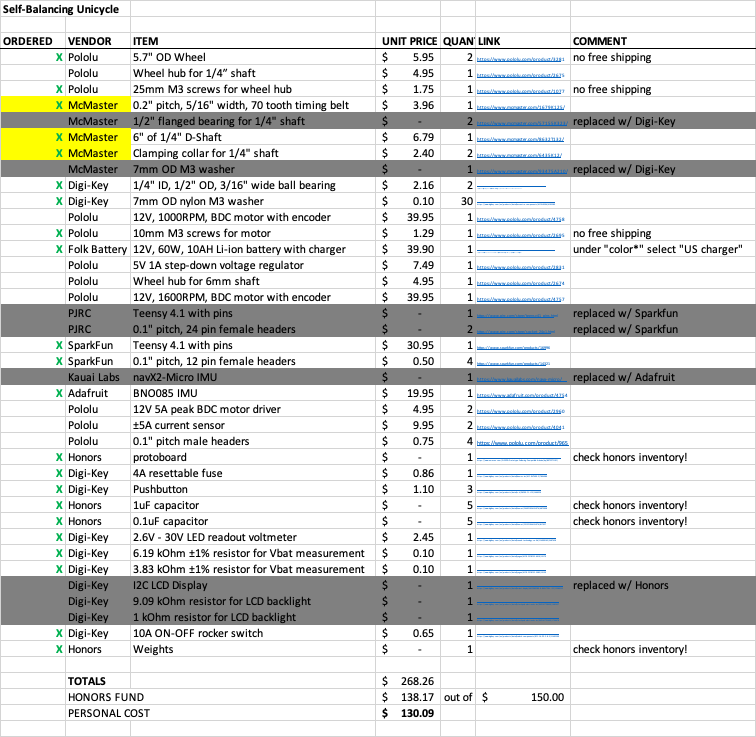
Battery | 12V, 60W, 10AH Li-ion battery connects to circuit via barrel connector. All circuit current flows through 4A resettable fuse. VBattery line connects to voltmeter readout (not pictured), ESCs, and 5V step-down regulator (not pictured). VBattery line also connects to microcontroller via ~2/5 voltage divider for battery voltage compensation in software. |
ATmega32U4 MCU | Currently using 8-bit AVR microcontroller because of mistake in circuit design. Despite requiring 5V power and having 5V literally printed on the silkscreen, ARM Cortex board was in fact not 5V tolerant. ATmega32U4 is a temporary 5V tolerant substitute. |
LCD | Readout for easier debugging and user feedback. Displays IMU calibration status, sensor readings, and motor outputs. Updated via 4800 baud Serial connection. Screen refreshed at 4Hz. |
BNO085 IMU | Accelerometer, Gyroscope, and Magnetometer with on-board sensor fusion, automatic recalibration, and high-frequency gyroscope integration. Interrupts MCU at ~1kHz when new data is ready. |
ESC | 12V 5A BDC motor driver with simple PWM+DIR interface. Configured to be in “break mode” for more linear motor control. |
Current Sensor | ±5A current sensor with analog interface. Used for limiting or controlling current/torque applied to motors. |
Motor/Encoder | Brushed DC motor with built-in 10:1 or 6.3:1 gearbox and 64 CPR quadrature encoder. |
Software:
Delay Call | Since the Teensy 2.0 ATmega32U4 (16 MHz, 2K RAM) is significantly less powerful than the Teensy 4.1 ARM Cortex (600 MHz, 1024K RAM) I was originally going to use, special care had to be put in to extract every bit of performance from the hardware. Instead of blocking on hardware Input/Output, I created a very simple version of “threading” where other tasks can be executed in the background when waiting. This is a huge, necessary improvement over, for example, Arduino’s “delay(…)” function which simply burns CPU cycles in a loop for the specified amount of time. |
Asynchronous | Again, since the Teensy 2.0 ATmega32U4 is significantly less powerful than the ARM Cortex I was originally going to use, I had to develop creative solutions to get around certain hurdles. Good DC motor current control for example requires a very high update rate to do well. That’s why I set up the processor’s ADC in “free running” mode as opposed to simply polling (and blocking on) ADC readings in the main loop. |
Loop | The is the main control loop. This is where I will develop my more advanced controllers. |
Initialization | This code sets up all the hardware before the robot runs. |
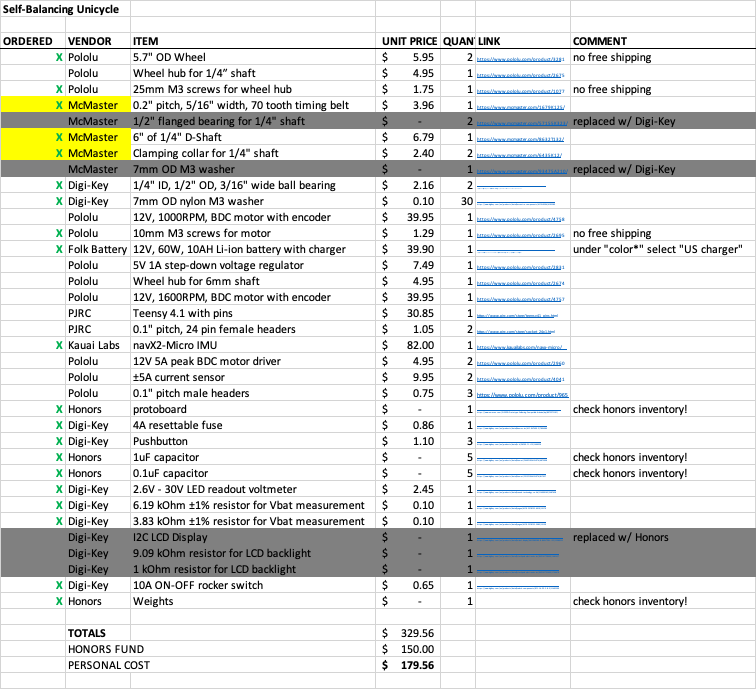
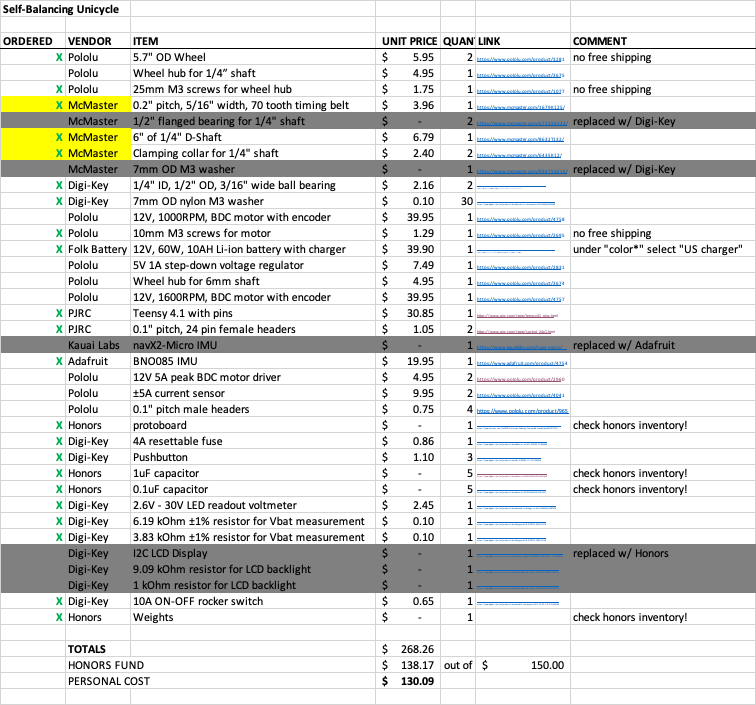
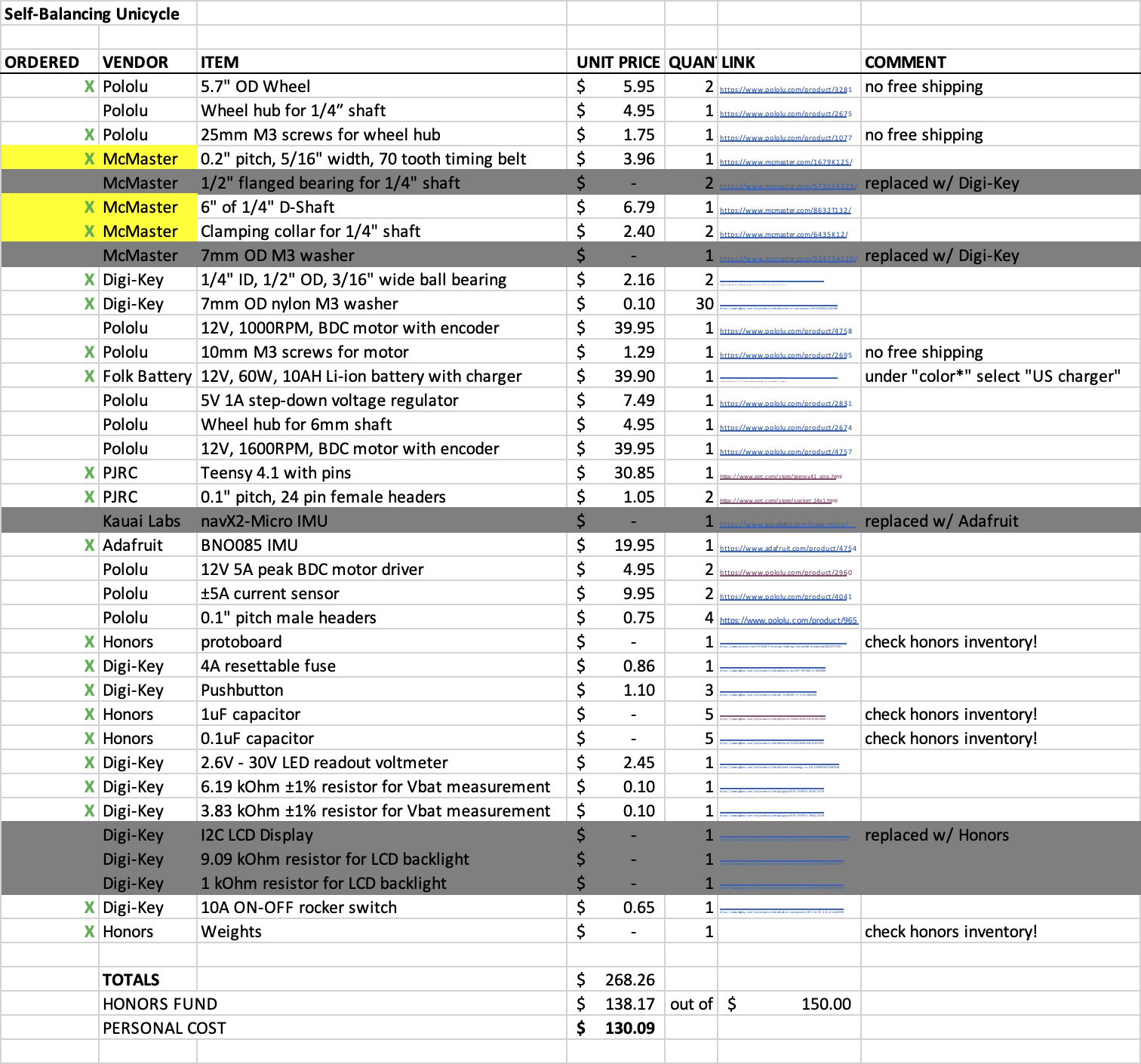
Parts
Possible Challenges
Please list some of the challenges that your group foresee in working on your project.
- I'll need access to an on-campus machine shop / makers space which might be difficult during COVID.
- State-space modeling is a bit challenging. I'm currently taking Diff. Eq. though should be able to learn the rest online.
- Failures / Breakage of my mechanical design might cause major set backs.
- The reaction wheel might not have a high enough inertia to stabilize the robot. Would have to order new parts / rebuilt it.
- The reaction wheel might not be perfectly balanced and could jiggle the robot.
- In the renders above, if the robot were to fall, it would bash the reaction wheel and potentially damage the motor.
References
- [Undergraduate Project] Balancing Motorcycle - YouTube
- Arduino Field Oriented Controlled Reaction Wheel Inverted Pendulum - SimpleFOC - YouTube
- The Physics of Countersteering - YouTube
- Equations of Motion for the Inverted Pendulum (2DOF) Using Lagrange's Equations - YouTube
- State Space, Part 1: Introduction to State-Space Equations - YouTube
- State Space, Part 2: Pole Placement - YouTube
- State Space, Part 3: A Conceptual Approach to Controllability and Observability - YouTube
- State Space, Part 4: What Is LQR control? - YouTube
- Classic Inverted Pendulum - Equations of Motion - YouTube
- Self Balancing Stick - Dual Axis Reaction Wheel Inverted Pendulum - YouTube
- Battery Type Comparison || Lead Acid VS NiMH VS Li-Ion VS LiPo - YouTube
- EBike Battery Pack || DIY or Buy || Electric Bike Conversion (Part 2) - YouTube
- BMS (Battery Management System) || DIY or Buy || Properly protecting Li-Ion/Li-Po Battery Packs - YouTube
- Getting Started With 3D Printing in Blender - YouTube
- Accelerometer & Gyroscope Sensor Fusion | DigiKey
- Time-optimal control for reaction wheel pendulum - IEEE Conference Publication
- Brian Douglas - YouTube
- SDPSI Timing belt calculator
Attachments:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments:
|
This sounds like a very cool project. I do have some concerns:
Again I think this is a really neat idea and would make a cool project, just want to make sure it is feasible amount of work and fits with the provided budget. |
|
I will echo the concerns of Michael, it seems like you gave a good list of goals though so you have an idea of what to prioritize in case your time or budget is lacking. This still seems REALLY ambitious Try to get a detailed parts list ASAP, this will not only give you ideas on how your drive wheel will be, the mass of the objects mounted to the unicycle, etc I will approve the project but make sure you get that detailed parts list and list any references you used. |
|
Hi Michael and Dawid, I do have some related experience with control systems programming and robotics, I've written about a few of my past projects here: https://kunalsheth.info. Regarding cost, it was suggested earlier that we can help pay for our own parts. I confirmed this later with James. I'm still putting together a "neat" system overview (currently its all written loose-leaf). I'll upload a KiCad schematic soon. Thanks so much! |
|
Awesome portfolio! The proposal and project look great! We were just trying to make it clear that the project is on the higher end of difficulty. As always, if you have any questions just let us know! |