| Name | NetID | Section |
|---|---|---|
| Raj Baala | kbaala2 | ECE 110 |
| Rishab Rao Veldur | rveldur2 | ECE 110 |
| Jiyoon Lee | jiyoon3 | ECE 110 |
| Enrico Manahan | emanah2 | ECE 110 |
Statement of Purpose
Our project consists of a robotic hand that is manually controlled by human hand gestures when wearing an electrical glove. Each gesture that is made by the human when wearing the glove will be directly copied by the robotic hand. The goal of our project is to create this robotic hand and electrical glove so that the hand follows the hand gestures and potentially even serve as a prosthetic hand for those in need. The problem our group is trying to solve is to help those who cannot use one of their hands to grab onto items and interact with them. The robotic hand could be built onto a person and they can use their other working hand with the electric glove in order to make use of it, thus serving as a prosthetic hand. This project is unique in the way that it allows the use of the users working hand to direct the prosthetic one.
Background Research
Most of the information that we gathered was found from the following link, https://create.arduino.cc/projecthub/Gabry295/how-to-make-a-remote-controlled-robotic-hand-with-arduino-32b0f5?ref=platform&ref_id=424_popular___&offset=168. The following page contains the necessary hardware components, instructions, and tools/machines needed to finish this project. Our drive to work on this project is our interest in parallel communication between humans and technology. This project is important as it can potentially be used to aid those who are disabled and can’t properly use their hands to make gestures or grab objects etc. It is also a great way for us to learn how certain hardware components in this project work as we are not familiar with them and we will be able to learn how it aids in the actual communication in the circuit as the user moves their hand. Other projects we looked at are a bluetooth controlled car. It is not exactly the same, but it requires human action on an external device to make something move. This is more firmware based as a phone app needs to be created to communicate to the car to move, steer, etc. This robotic arm project incorporates direct human input by using hand gestures than by using an app to control an external device.
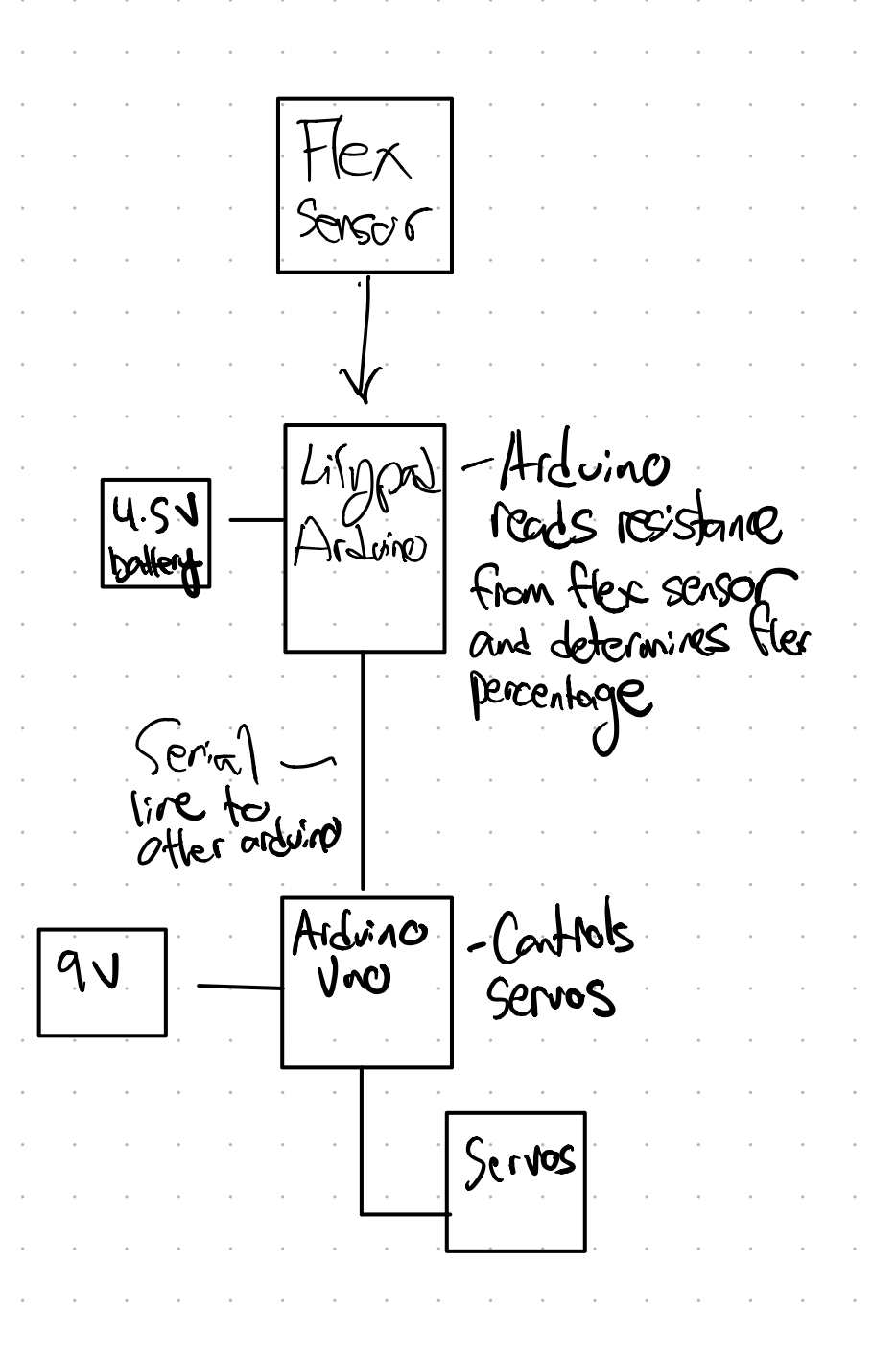
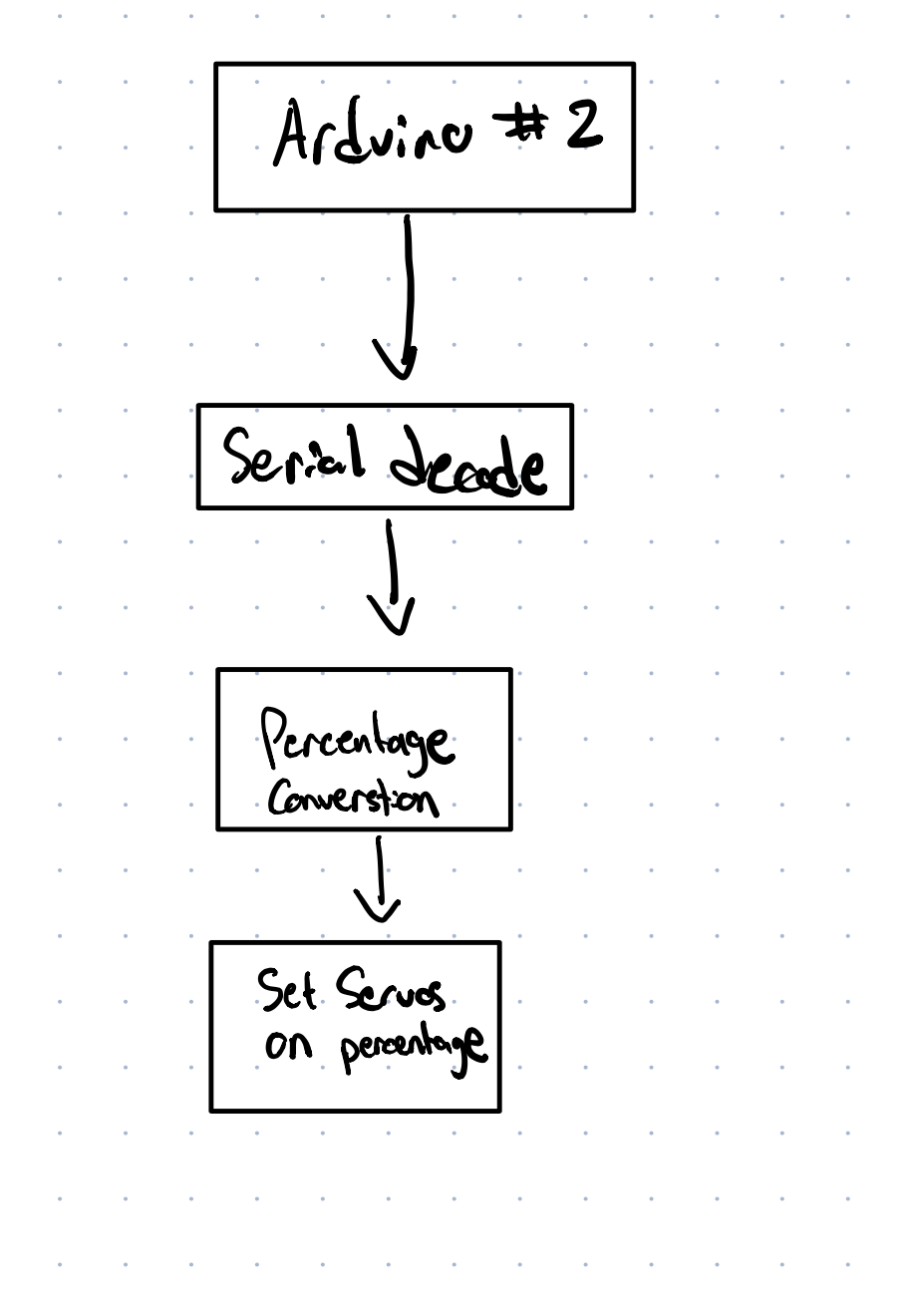
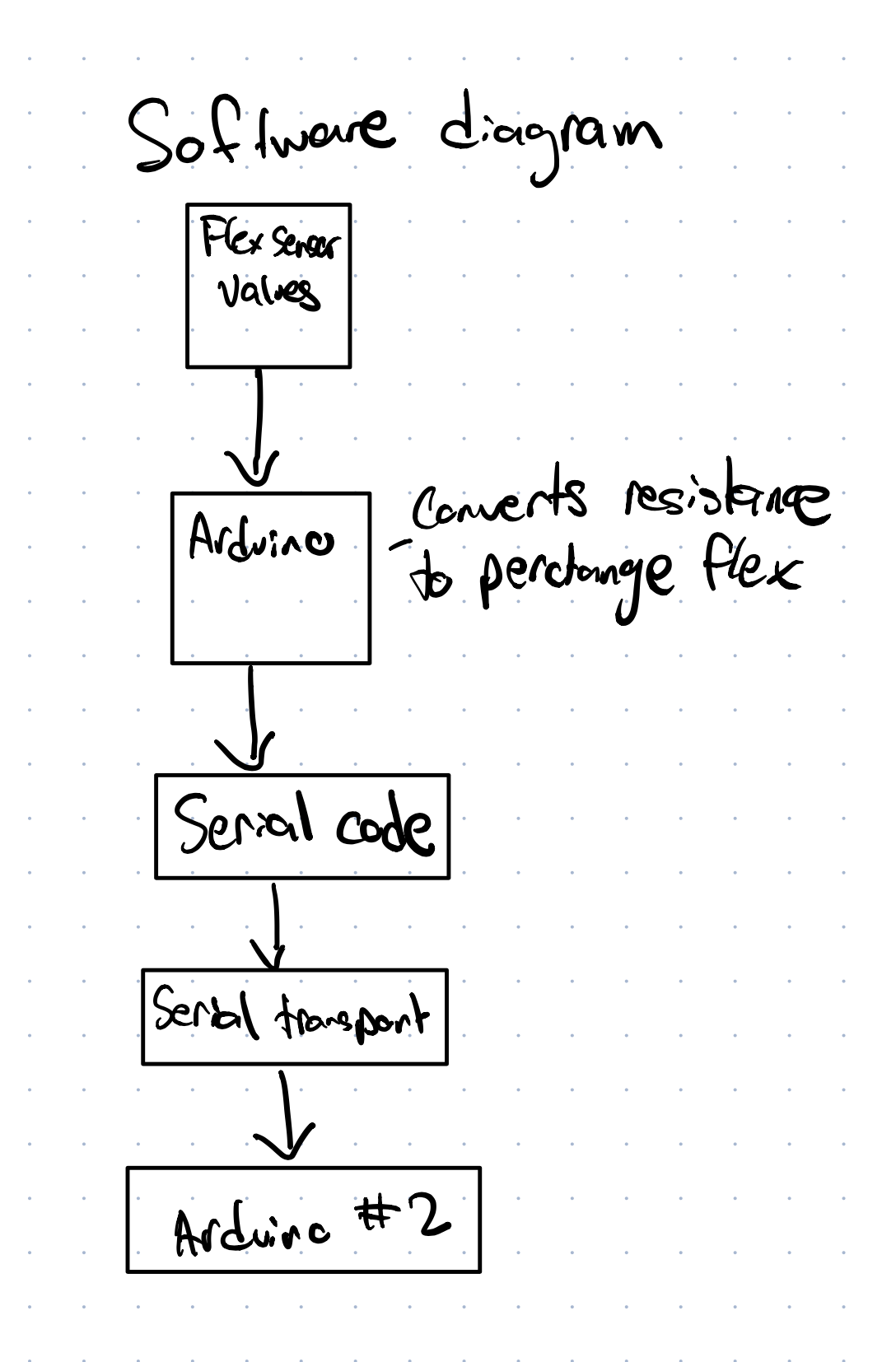
Block Diagram / Flow Chart
Provide a simple block diagram of your hardware design. A block diagram is a schematic graphic that shows the interactions between different components in a hardware or software system. If appropriate, please also include a flow chart showing the steps your design needs to go through to function. The online program draw.io is a great tool to create polished block diagrams and flow charts. Likewise Microsoft's visio is also a great program to create block diagrams and flow charts.
System Overview
Parts
Building The hand
- We are cading a 3d printable version of the hand. We simply have to mount the motors and tie the fishing line.
Differences in our design
- Our design has a rotation aspect as well. This is done using a gyro on the hand and a servo on the join of the hand.
Possible Challenges
- Writing the serial code between the arduinos
- properly configuring the flex sensors on the glove
- making some small and tight wirings on the glove/board
- Troubleshooting
References
[1]"How to Make a Remote Controlled Robotic Hand with Arduino", Arduino Project Hub, 2021. [Online]. Available: https://create.arduino.cc/projecthub/Gabry295/how-to-make-a-remote-controlled-robotic-hand-with-arduino-32b0f5?ref=platform&ref_id=424_popular___&offset=168#toc-how-does-it-work-0. [Accessed: 21- Feb- 2021]