Xin Jin (xinj3@illinois.edu) ECE 110
Hongshuo Zhang (hz13@illinois.edu) ECE 110
Haoyu Wang (haoyuw7@illinois.edu) ECE 120
The Final Report: FINAL PROJECT REPORT Remote Control Car.pdf
The video below is our project demo.
Have a good winter break everyone!
Introduction
Statement of Purpose
Most accidents happen due to people's carelessness. If all cars have a system that warns drivers and automatically stops the car behind close obstacles or pedestrians, many accidents can be avoided. Our project is to design a user-controllable car that warns the user if there is an obstacle near the car. The car will eventually stop if the user is still trying to make the car moving forward when there is an obstacle. Our project has a real-world application. If all cars are equipped with our system, the rate of severe and fatal traffic accidents will decrease.
Background Research
According to MIROS (Malaysian Institute of Road Safety Research), In 2011, 80% of road accidents were man-made, 13.2% were road problems and 6.2% were traffic problems. A collision avoidance system, also known as a pre-crash system, forward collision warning system, or collision mitigating system, is an automobile safety system designed to prevent or reduce the severity of a collision. We can avoid many people's deaths and injuries by adding a collision avoidance system to remind people of danger. Many car companies such as BMW and Ford have developed effective systems and our work is based on their achievements.
Design Details
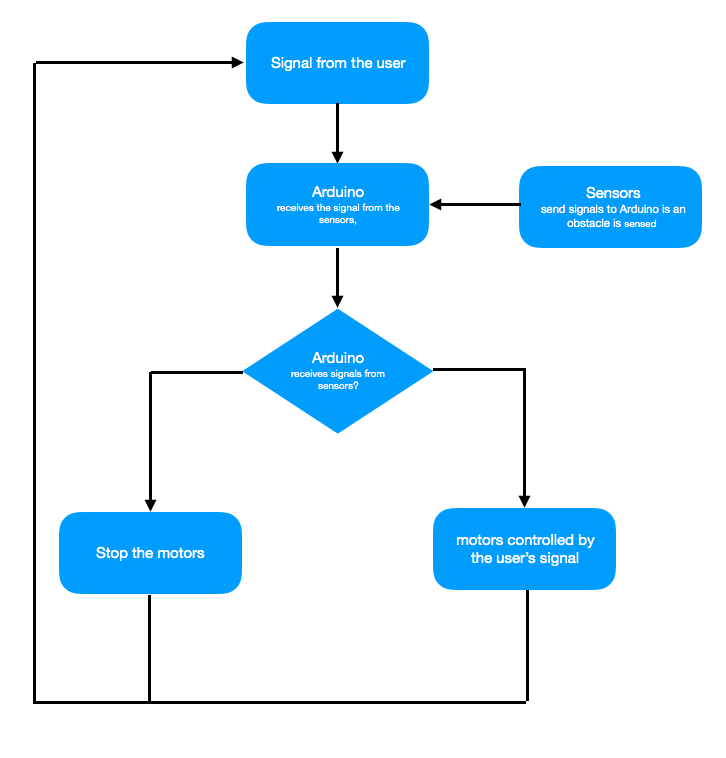
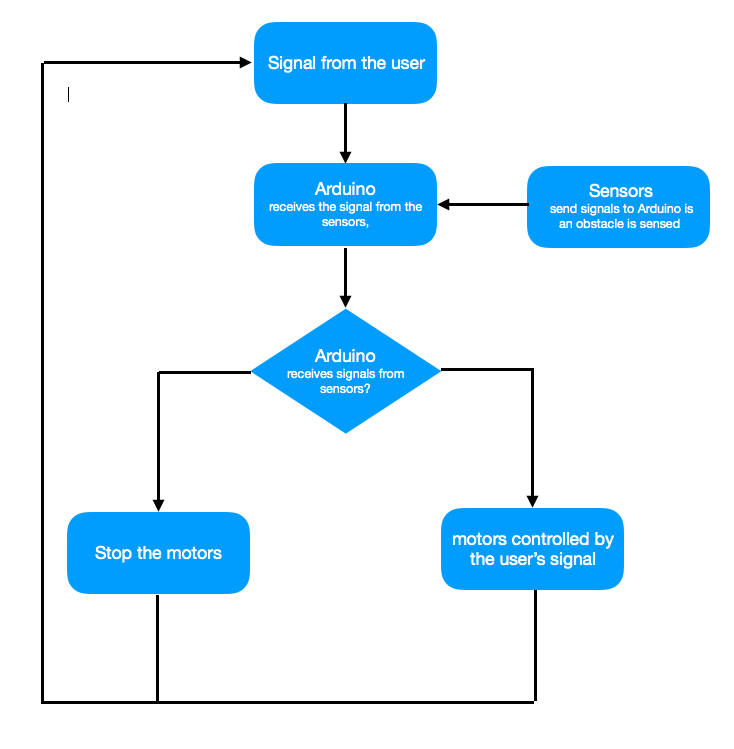
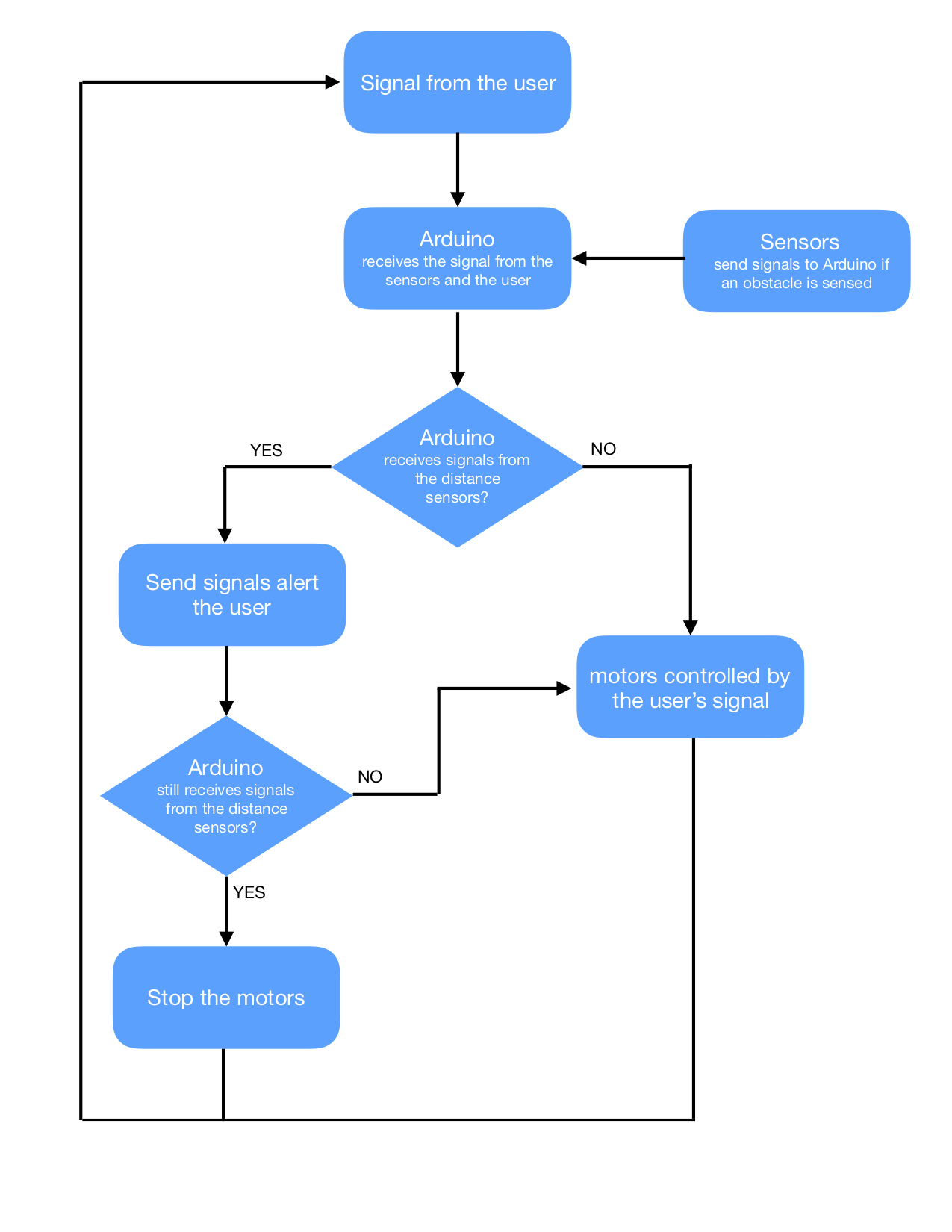
Block Diagram / Flow Chart
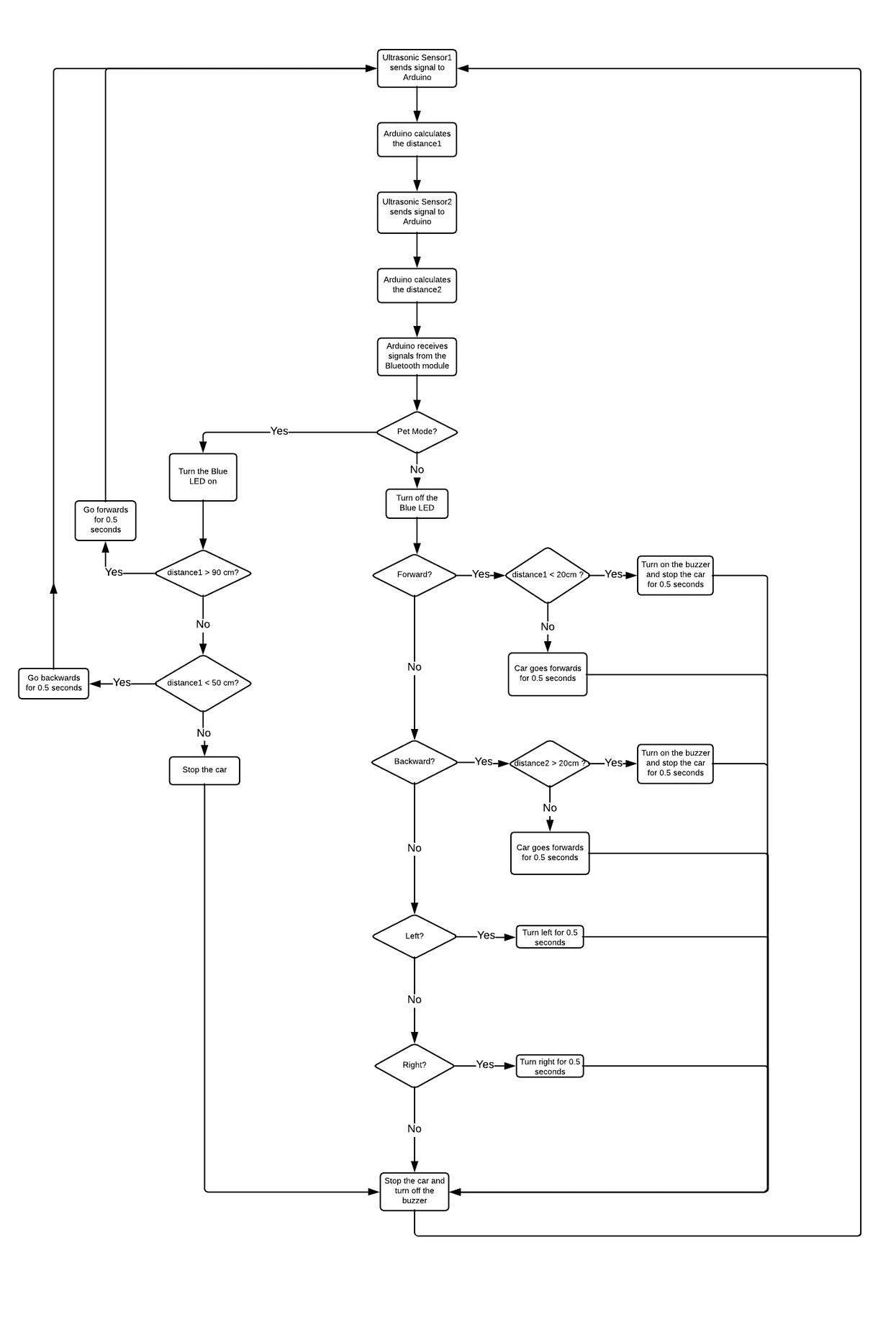
System Overview
There will be an app that the user can use to remotely control the car by Bluetooth.The user sends the signals to the Bluetooth device. Then, the Bluetooth device will send signals to Arduino, and the Arduino will control the movement of the car by turning on and off the motors. Meanwhile, the distance sensors will detect if there is an obstacle near the car. If the obstacle is too close to the car, the car will send warnings to the user (such as sound and light). The car will keep warning the user if the obstacle is not removed. If the user is still trying to move the car towards the obstacle, Arduino will stop the motors, which stops the car. Arduino will give the control back to the user if the obstacle if removed.
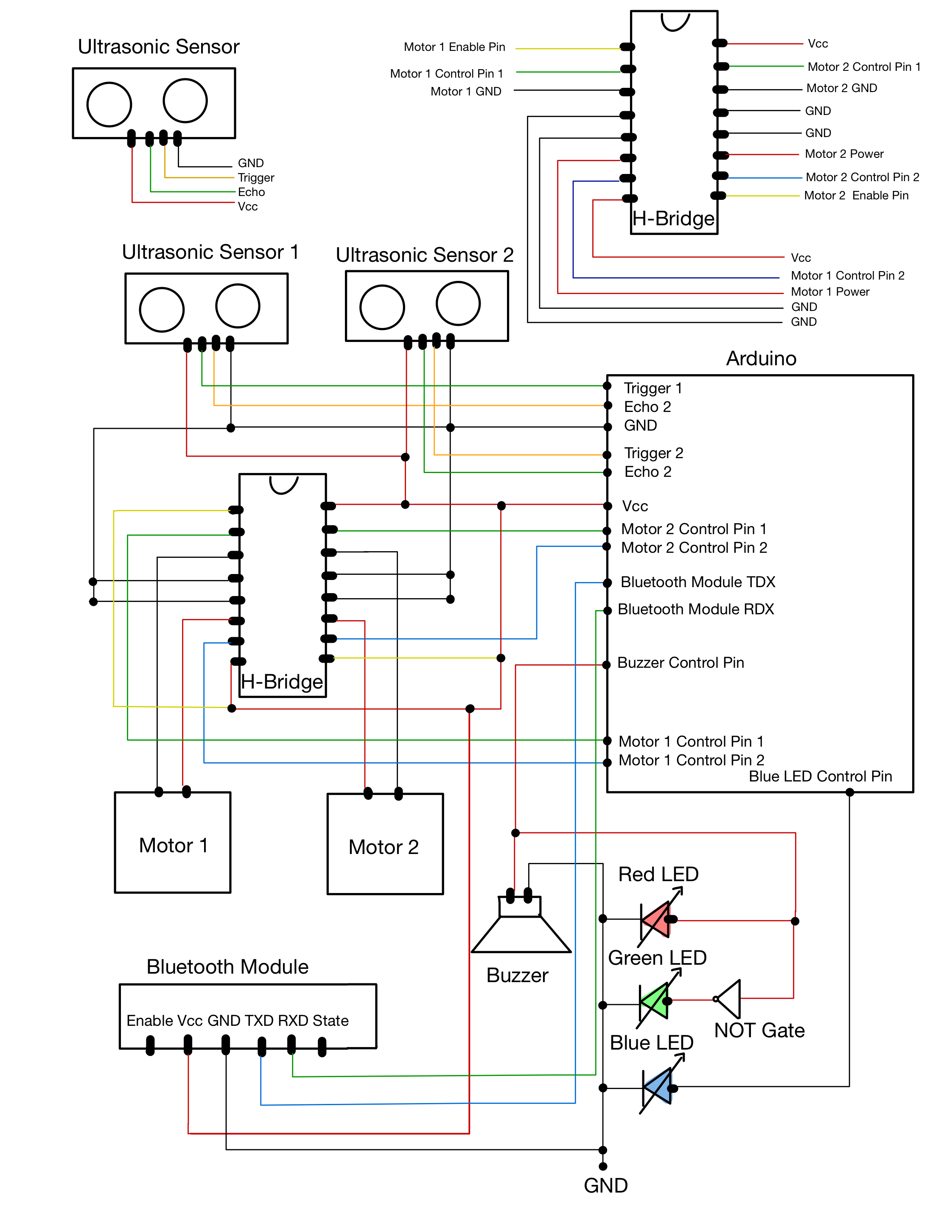
- Circuit Diagram
Parts
- Arduino
- Bluetooth Module
- Breadboard
- Buzzers
- Car Chassis
- Motors
- Wheels
- Distance Sensors
- LED lights
- Logic Gates
- Etcetera
Possible Challenges
- Sensors may have trouble identifying obstacles.
- Arduino Control Board may have trouble analyzing complex road situations.
- We the humans may have trouble designing effective collision avoidance alternatives.
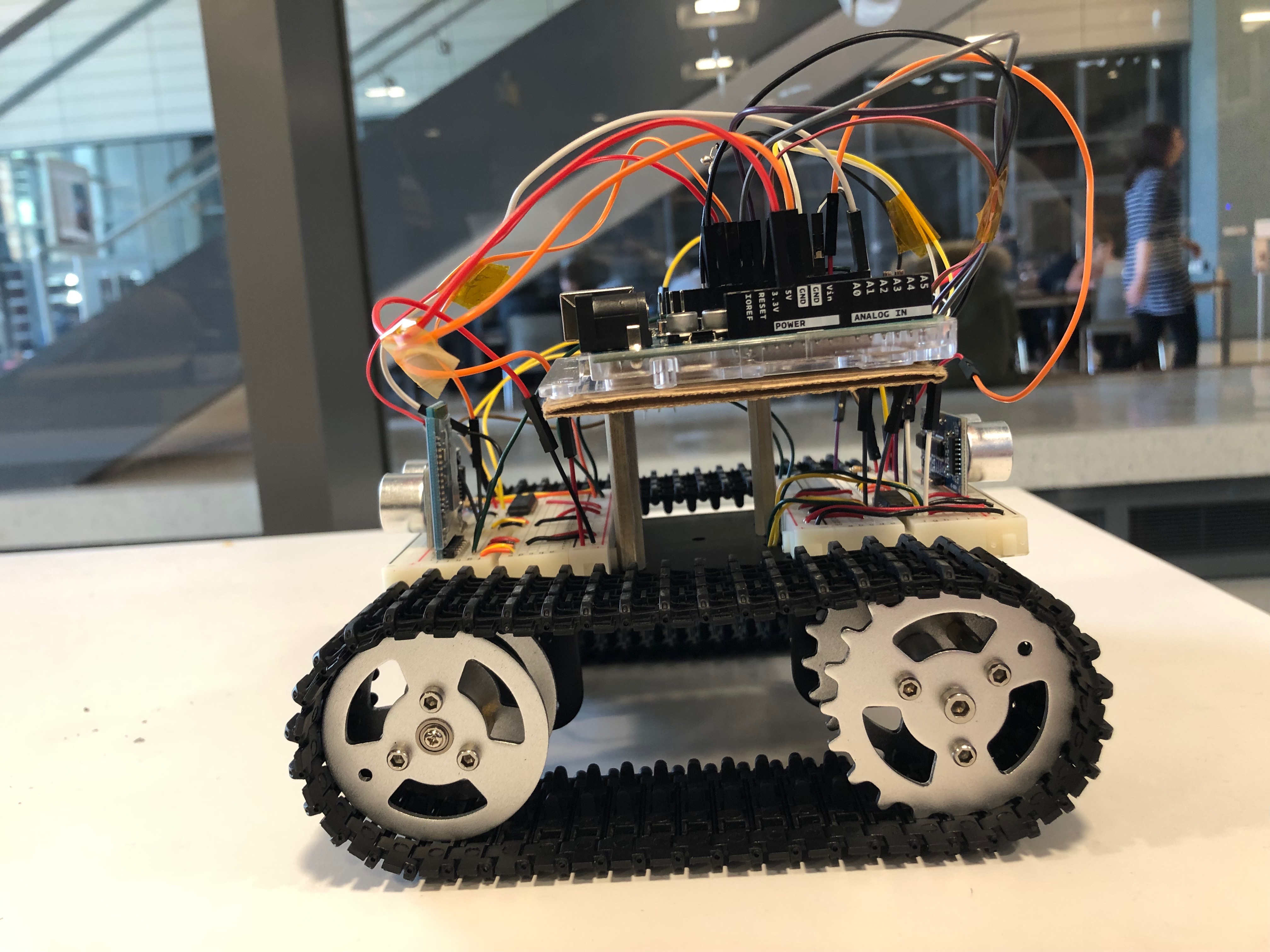
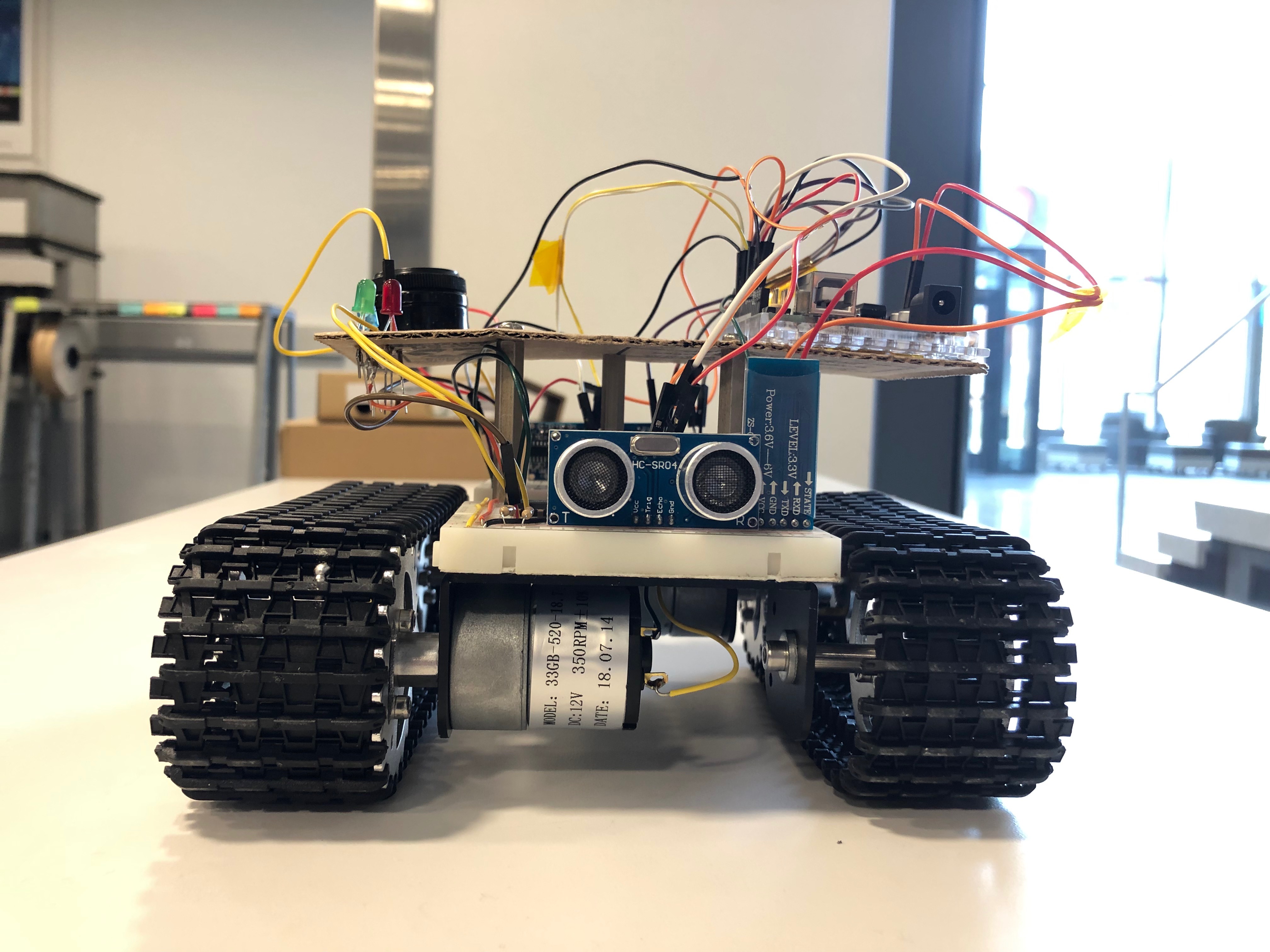
Design Configuration Photos

References
《交长:80%人为因素 平均每天18人车祸死》, http://www.kwongwah.com.my/?p=85545 28/01/2016
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}