Name | NetID | Section |
Arnav Mehta | arnavm7 | ECE 120 |
Max Ma | maxma2 | ECE 120 |
Kevin Chen | kevin17 | ECE 110 |
Statement of Purpose
Our project is a headset and camera system: a user wears a headset, and can remotely turn a camera using head movements. Video input from the camera would appear on an external computer.
A possible goal could be to extend the headset so that a user can see video input directly from the headset (as opposed to having to look on an external computer).
This project has the unique function of allowing a user to see inside a room they don’t have access to (provided that the camera is within the room).
Background Research
This project has extensive surveillance/security applications. If someone wants to examine the inside of their house when they are not home, they could potentially use our system.
In coming up with the project, we looked at previous projects that included basic wireless connections, such as a remote-controlled robotic car. However, we found that joysticks were problematic because they limit the precision of movement for a user. Thus, our project differs from most problems since our input mechanism is a wearable instead of a hand-held remote.
Block Diagram / Flow Chart

System Overview
One arduino will be connected to a servo motor. Another arduino will be communicating with the first arduino. The second arduino will be connected to the gyroscope module; this arduino will take in “rotational” data from the gyroscope(this would be from the user turning their head, for example), which we will send to the original arduino using a wireless connection. Based on the data, the first arduino will rotate the servo motor appropriately, allowing the camera to visually scan a room. The camera will be an IP security camera, whose video information we can access remotely on another device.
Parts
Part Name | Quantity | Model Number | Purpose | Vendor | Price | Link |
D-Link HD Wi-Fi Indoor Security Camera (DCS-8010LH-WM | 1 | DCS-8010LH | To record the environment | Walmart | $44.99 | https://www.walmart.com/ip/D-Link-HD-Wi-Fi-Indoor-Security-Camera-DCS-8010LH-WM-Qty-1/756286291 |
ESYNIC Waterproof 20KG High Torque Metal Gear RC Servo Motor for Toy Airplane Helicopter Boat Car | 1 | 5521MG-180 Digital | Servo motor to spin the webcam | Walmart | $15.85 | |
Arduino Uno Rev3 | 1 | A000066 | To control the servo motor and the headset | Arduino | $23.53 | |
GY-521 Model 6 DOF MPU-6050 Module 3 Axis Accelerometer Gyroscope Module | 1 | GY-521 | To detect the rotation from the user | Walmart | $9.19 |
Possible Challenges
Real-time, accurate connection between the headset and the camera platform.
Gyroscope sensor measures speed and acceleration - we ideally want to obtain positional values
Precise rotation of the camera platform
Non-cumbersome headset
Connection between servo and microcontroller
Final Report
Video: https://drive.google.com/file/d/1wsQJYCV0v83dRNVk9vabE1cfh_6Ek6xJ/view?usp=sharing
Statement of Purpose
Our project is a headset and camera system: a user wears a headset, and can remotely turn a camera using head movements. Video input from the camera would have appeared on an external computer, but currently we have it appearing in an app called MyDLink. The headset also has a reset button to reset the position of the camera. We are trying to solve the problem of the limited range of vision that a security camera provides. We think that security cameras would be more effective if they allowed someone using the camera to control it remotely with natural body movements.
Features include the security camera itself (a “MyDLink) camera, the base of the camera with a servo motor and a wifi chip, and the headset (PCB with a wifi chip and gyroscopic module). The benefits of this headset is that it is non cumbersome, and based on the natural motion of turning one’s head (the camera is an extension of someone’s vision). The WiFi chip allows remote access - someone not in the room can remotely turn the camera and see inside the room. This has tremendous security applications in the areas of home security and building security.
System Overview
The MyDLinkApp is a security camera app linked to the security camera itself.
The camera is a MyDLink camera that rests on a base.
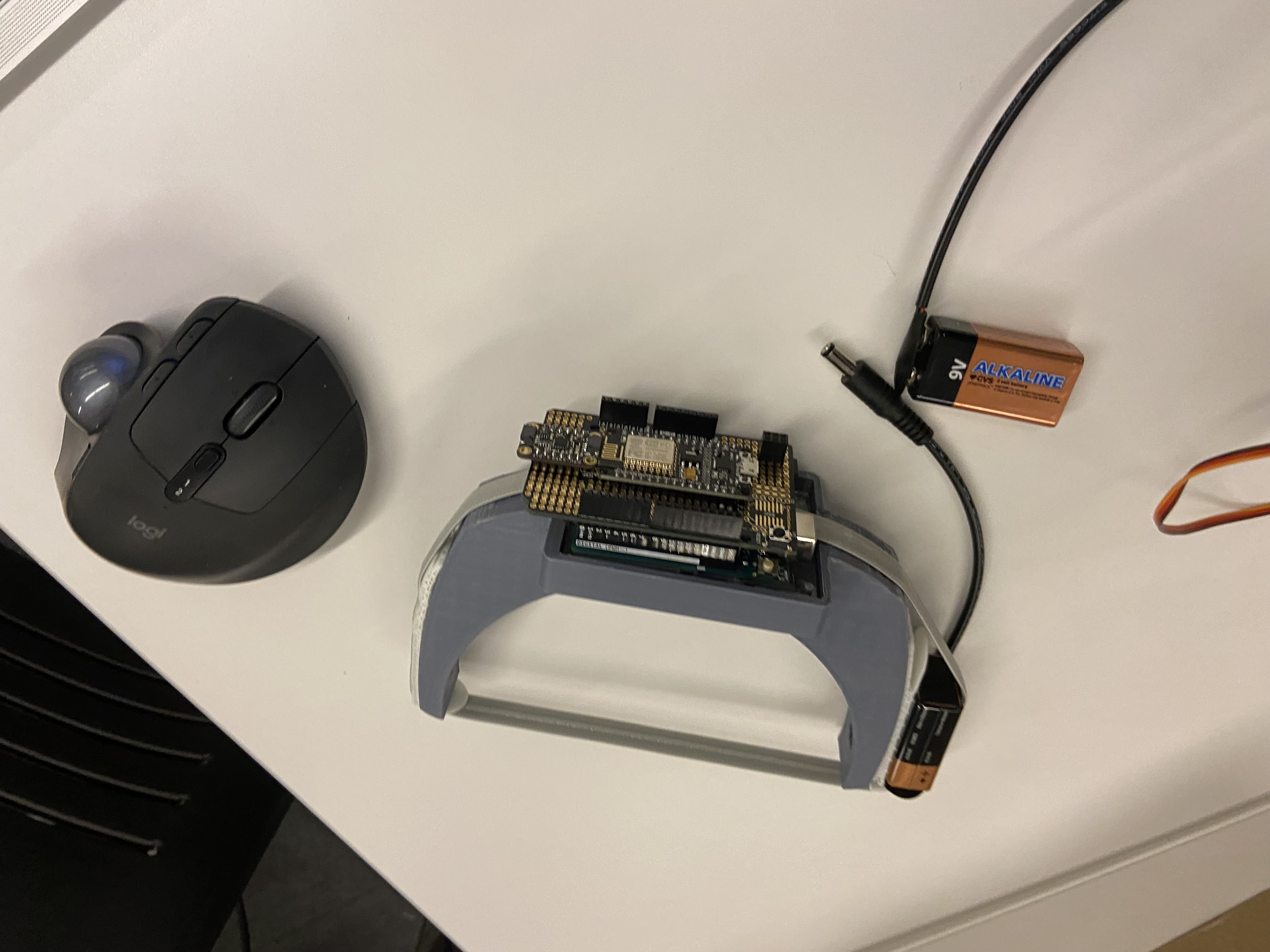
The setup looks like this:
The first picture is the headset, the second is the PCB on the headset, and the third is another PCB connected to the camera and its servo motor.
The first PCB is what the user wears on the head - it has the gyroscope sensor (IMU), and the WiFi chip on the headset broadcasts structured gyroscopic data to the WiFi chip on the PCB connected to the camera (code below).
The second PCB has a WiFi chip that receives the data from the first one. It is connected to a servo motor inside the base of the camera (indicated by the wires), and the servo motor spins the camera according to the structured data it receives (code below) - it matches the position sensed by the gyroscopic module. The video is sent to the MyDLink App.
Problems and Challenges
We ran into the issue of getting two arduinos to communicate wirelessly with each other, which was our initial problem. We replaced arduinos with WiFi chips and programmed these instead. We also replaced our original 20kg Torque motor with an SG90 Micro servo motor, as the 20 kg Torque motor could not deliver enough power and was unreliable. We also had a little bit of trouble configuring the MyDLink app, and had to make a few 3D prints before we got the base of the camera right.
Results
The sensor is an MPU-6050 Gyroscopic Module, and the primary actuator is a SG90 Micro servo motor. We did some quantitative tests - we had someone wear the PCB and leave the room, and begin turning their head - they also were looking at the DLink video on the app, so they were able to verify that they were properly controlling the camera.
Future Plans
Future plans include creating a custom PCB, creating a way for users to directly see video rather than having to look at an app, and increasing the range that someone can be at and that this device still works at.
References



Youngblood, T., 2015. Servo Motor Control with an Arduino. [online] All About Circuits. Available at: <https://www.allaboutcircuits.com/projects/servo-motor-control-with-an-arduino/> [Accessed 17 September 2021].
https://drive.google.com/file/d/1ASlr7q4l-xr7FcTCl4PtfJVFCU-wkm_s/view?usp=sharing
https://drive.google.com/file/d/15RPRCvxf_EBhgrLpFVhiCKvKMSLx8TEv/view?usp=sharing