| Members | Net ID | Class |
|---|---|---|
| Zach Mizrachi | zdm3 | ECE 120 |
| Nicki Sherlock | nns5 | ECE 120 |
| Savannah Pagan | spagan6 | ECE 110 |
| Meer Gujral | mgujral2 | ECE 110/120 |
Statement of Purpose
Our purpose in doing this project is to interface a Neurosky Mindwave EEG sensor with a custom built Electric Longboard. Not only are projects like this still extremely new, it will allow us as a team to explore various new concepts including programming, electronics, and mechanics. We believe that a further exploration into the capabilities of Brain Computer Interfaces (BCI’s) will be extremely relevant to future innovations and designs.
Background Research
The concept of designing electric longboards from scratch has been explored thoroughly and is well documented online, however, the integration of EEG technology within Electric Longboards has rarely been done before. EEG abbreviates electroencephalogram, which is a device that reads the electrical signals produced by the brain. In order to function, the Mindwave is injected a half inch below the surface of the skull (JK LOL). The Mindwave is entirely safe and passive, it is simply a headset that is worn like a hat or helmet. The Mindwave comes with a free SDK that allows its technology to be used in projects such as this.

Block Diagram / Flow Chart
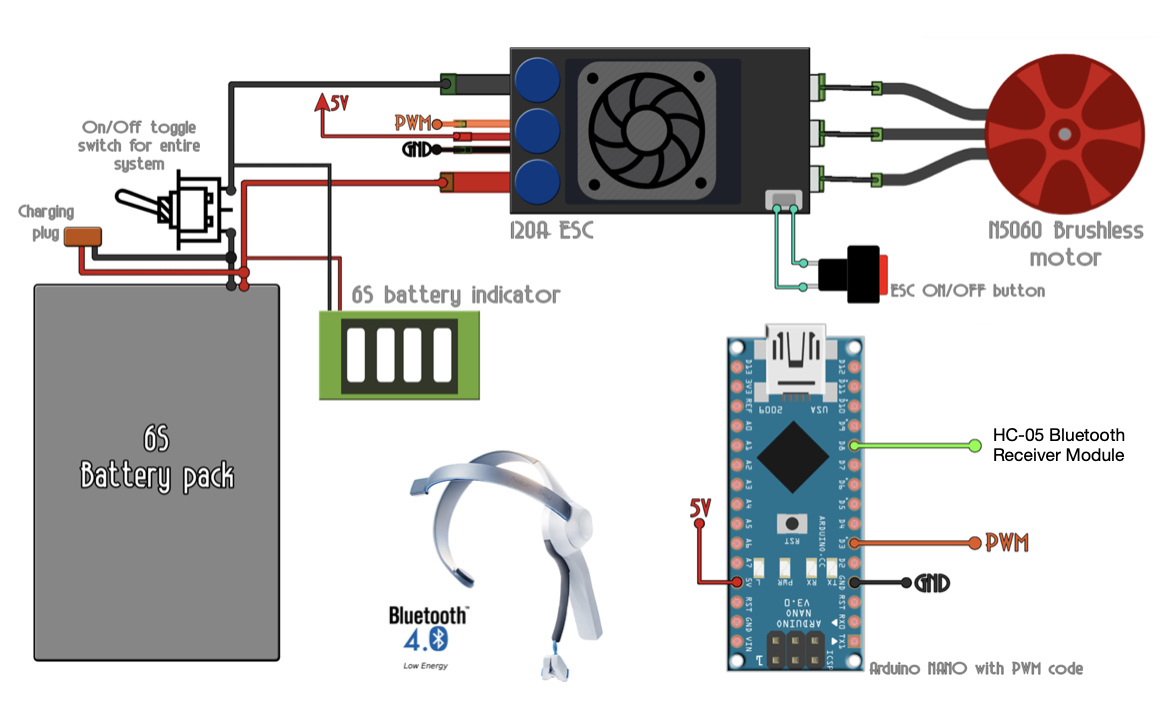


System Overview
The brain of our system will be a Raspberry Pi mounted on the belly of the longboard. The Pi will receive input via bluetooth connection from the Neurosky Mindwave, which will then perform signal processing and make a calculated decision regarding what commands to send to the motor. The longboard will be driven by a single motor on a pulley system. This motor will be mounted via metal motor mounts that will be attached to the trucks. The rest of the assorted electronics (motor controllers, batteries, etc) will be attached to the bottom of the board. All electronics will be enclosed in 3D printed casing.
Possible Challenges
There are challenges that may be faced concerning the Neurosky Mindwave, the longboard, and the integration of these technologies together. Firstly, with the Mindwave, a big challenge may be the difficulty of accessing the raw EEG values as opposed to the values that are produced for Neurosky’s web applications. Separately, with the longboard, some issues we may run into include difficulty connecting to the motors and difficulty producing smooth acceleration curves. Lastly, there may be difficulties mapping the brainwave signal to the motor signal, and figuring out how to use one signal to establish both the breaking and acceleration vectors to send to the motors.
References
References
», M., 2020. DIY Electric Skateboard. [online] Instructables. Available at: <https://www.instructables.com/id/DIY-Electric-Skateboard-1/> [Accessed 21 September 2020].
2020. [online] Available at: <https://www.youtube.com/watch?v=iFBhTHGXcMQ> [Accessed 21 September 2020].
2020. [online] Available at: <https://www.youtube.com/watch?v=chL5aMvtKm4> [Accessed 21 September 2020].
2020. [online] Available at: <https://www.youtube.com/watch?v=OXLx4UcU9DA> [Accessed 21 September 2020].
https://wiki.illinois.edu/wiki/display/ECE110HLSF15/Fall+2020+Honors+Lab+Section
Attachments:
Comments:
|
It's great that you've included a flow chart, but please also include a block diagram. The block diagram should show how different components of your project connect to one another (e.g. motor → motor controllers → Arduino). Please reference some of the other projects from past semesters for acceptable block diagram designs. My main concern with your project is whether you'd be able to get any useful data out of the Neurosky Mindwave. Have you done any research into determining what this can or cannot measure? Please include any projects you've researched that might have used this device, or even better, if you have definite data showing a measurable difference between two things a user is thinking (e.g. here is an EEG graph when the user is thinking "accelerate forward" and here is an EEG graph when the user is thinking "stop"). The other major concern here is safety. As you've said, this is a very experimental technology so there are bound to be bugs. How will your system implement safety features to prevent accidental injury? For example, what happens if the user is trying to stop, but the board thinks he/she is trying to accelerate? |
|
Also, format your references in the IEEE format (more details on Fall 2020 Honors Lab Section) |
|
Hi Wang, James, please see our updated page concerning the block diagram and previous EEG projects. As you can see in the included "Mind Controlled Drone - Tutorial" one of the Neurosky mindwave outputs is a concentration level, which is most likely what we will use for our project. Essentially, when the user is concentrating on accelerating forward, the board will accelerate based on a curve that takes safety into account - and the same for deceleration (when the user stops concentrating, the motors will be ramped down slowly, and not immediately). Another function of the Neurosky Mindwave is force blink detection, which we will also integrate into the project to enhance the safety. For instance, if the Mindwave detects a force blink, that can act as a kill-switch to turn the board off/slow down automatically. Additionally, as we begin our experimentation, the code will reflect very high concentration values necessary to seriously accelerate. In essence, we will not use the full power output of the motors until we have become satisfied with the feedback of the mindwave sensor. |
|
I watched the video of the mind-controlled wheelchair you posted, but I'm still rather concerned about the safety of your project. You can see how it sometimes takes him several tries before he's able to get the Neurosky to activate. Not to mention he has to wait several seconds for the code to "cycle" through different options or directions before using a blink to select the one he wants. When you're travelling at high speeds (or even lower speeds), you'd need to be able to make quick decisions in fractions of a second. The whole "blink, cycle through commands, then blink again" routine doesn't seem to allow this to happen. I think the idea of using the Neurosky to control something is very cool, but could you think of something else where you wouldn't be putting yourself or others in danger if there was a malfunction? |
|
I understand the concern for the safety of the project. There is an inherent danger anytime you step on a longboard, but in regards to the project, there are various levels of safety that we would implement. First of all, the longboard would not be rode until the finalization of the project. This means that by the time we ride the board, the values from the Neurosky will be appropriately tuned to not produce dangerous outputs. Secondly, we plan on implementing an extremely slow, proof-of-concept type speed curve where we would essentially be crawling forward or stopping at a couple miles/hour max. In the video that you mentioned, the Neurosky was being used in a different way than it would be for the longboard. In the video, the "blink" is a necessary functionality in order to dictate the direction that the robot went. For this project, only one signal will be used, and the absence of that signal would mean deceleration. That means the user will have to be actively concentrating in order to accelerate, and the second that attention is lost, the board will slow down. Overall, we believe this approach will maximize the safety of the rider while allowing him/her control over the board. I had mentioned the "blink" functionality as an example of how we would stop the longboard. When moving at only a couple miles an hour, the need to stop abruptly is much less of an issue, and even with this, being able to force blink at any time and stop the longboard will ensure that the rider is always safe and in control. We are all extremely passionate about the project and have put a lot of time and effort in to research and planning. We plan on making safety our number one priority, and going back to what I mentioned previously, the board will not be rode until inputs from the Neurosky can be accurately mapped to safe outputs on the longboard. Given this, we believe that while there are dangers that come with this project (as with most projects) we will implement procedure that will ensure our safety from start to finish. |
|
I'd say for a fairly niche technology you guys have a lot of sources to help you out. You guys should definitely not test with actual people on the board, possibly even as an end product, there is a good reason while the wheelchair is "mini" and not with an actual person riding in it. |
|
I agree with the concerns of the other staff members. If you are completely attached to the idea of using the brainwave sensor, I would suggest building a simpler project to demonstrate it (like a robotic arm, or some other, non-life-threatening device!) If you absolutely must build a skateboard too, HL will not endorse any human testing. Please test it safely and without squishy humans in your test rig Budget is also a concern. The brainwave sensor already breaks the recommend budget, alone. Dawid said that you had some arrangement with Innovations LLC, though, which is good. Approved, as long as you do this safely, and don't exceed budget. |