| Name | NetID | Section |
|---|---|---|
Krish Patel | krishp2 | ECE 120 |
Ishanvi Lakhani | ishanvi2 | ECE 120 |
Nayantara Das | ndas6 | ECE120/110 |
Statement of Purpose
In the last 2 years, we have seen that students needed to quarantine themselves due to COVID. Because students were staying in their dorms, there were multiple logistics issues such as getting food and groceries. while trying to stay isolated. Therefore, we decided to design a delivery bot that would deliver items to the required location to tackle this issue.
Background Research
Upon arriving on campus, we attended multiple meetings by Illini Solar Car and Formula Electric and realized that we wanted to build a similar but small-scale autonomous project. Further, because we are engineers, we knew that we should build something which has a social cause and caters to a problem. We went through multiple previous year projects such as the autonomous drone and got the inspiration to make our delivery bot. After going through these, we tried to integrate all the new parts and components that we learnt about into our delivery bot.
Because multiple components of our project were new and because we had not worked with them before, we sat and analyzed the functionality of each and every component of our project.
We look forward to making this project and learning about new hardware components. We also hope to be able to apply the knowledge that we gain in our ECE classes while building this project.
Block Diagram / Flowchart
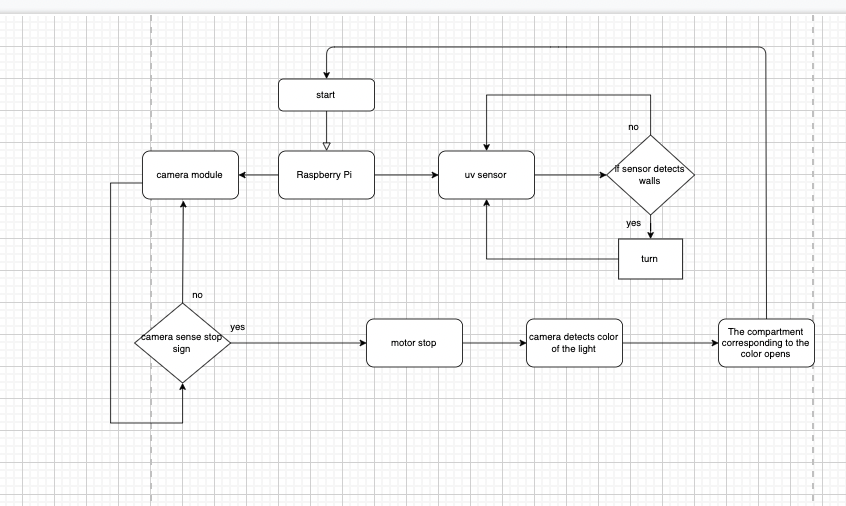
System Overview
The car starts moving in a unidirectional motion. It uses an ultrasonic sensor to detect walls.
If a wall is detected then a signal is sent to the Raspberry Pi which directs the motors to move in such a manner that the cart turns using to a clear path. If it doesn't detect a wall it will continue moving in the same direction.
As the cart moves in a unidirectional motion it continuously detects the barcode on the doors of the rooms.
When it detects the required barcode, it sends a signal to the Raspberry Pi which turns the servo motor to open the door of the corresponding compartment.
It then delivers the respective items and continues moving in a straight path.
To collect goods, it detects red color where it stops and opens the door to the compartments.
The user can then fill in the compartment with the goods they would like to be delivered and the cycle repeats.
Parts
You should include details such as the quantity, model number, purpose, vendor, and price (excluding taxes and shipping) for each part.
Possible Challenges
Mapping the dorm floor.
Ensuring that the items are delivered in time (no latency)
Obstacle detection
References
List all references you used in your proposal. This is important, you do not want to be blamed for plagiarism. IEEE citation format is highly recommended. You can use citethisforme.com's IEEE citation generator to painlessly generate your references in this style.
https://www.electronicshub.org/controlling-a-dc-motor-with-raspberry-pi/
Electronics Hub. 2021. Controlling a DC Motor with Raspberry Pi and Python. [online] Available at: <https://www.electronicshub.org/controlling-a-dc-motor-with-raspberry-pi/> [Accessed 20 September 2021].