Ivan Solis, ivans2, ECE110
Brahmteg Minhas, bminhas2, ECE120
- Introduction
- Create a hoverboard which will facilitate transportation.
The hoverboard will be a skateboard controlled with a bluetooth connected remote control with buttons for accelerating, decelerating and powering off. - Background Research
We've done some research into the types of automated skateboards that exist on the market and the DIY projects that people have done. Initially we were thinking of making a hoverboard that moved based on where the pressure of the rider was located (i.e. pressure in the front means accelerate and pressure in the back means decelerate) but due to the mechanical issues that presented such as deciding on an actuation force, controlling for the weight of the rider, building a proper suspension etc, we decided that completing this project would require more expertise and time than we currently had. Therefore, we decided on a skateboard controlled by bluetooth. This eliminates many of the mechanical issues we would have had so our main focus could be on the bluetooth-arduino communication and arduino-motor communication. We liked this idea as commute across such a large campus such as UIUC can be time consuming and tiring and it is a problem that a lot of college campuses have. Other solutions such as Boosted Boards can be costly.
- Create a hoverboard which will facilitate transportation.
- Design Details
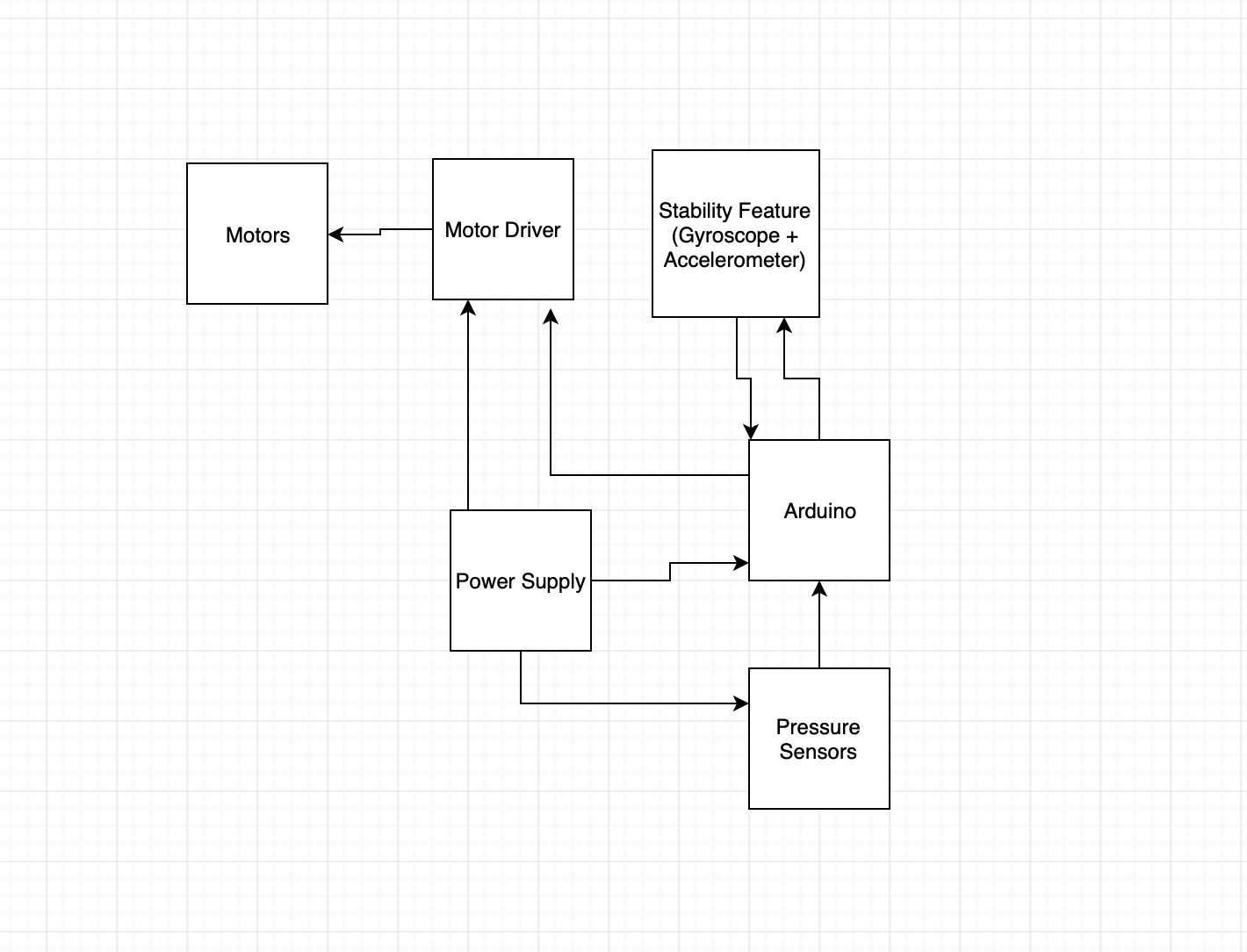
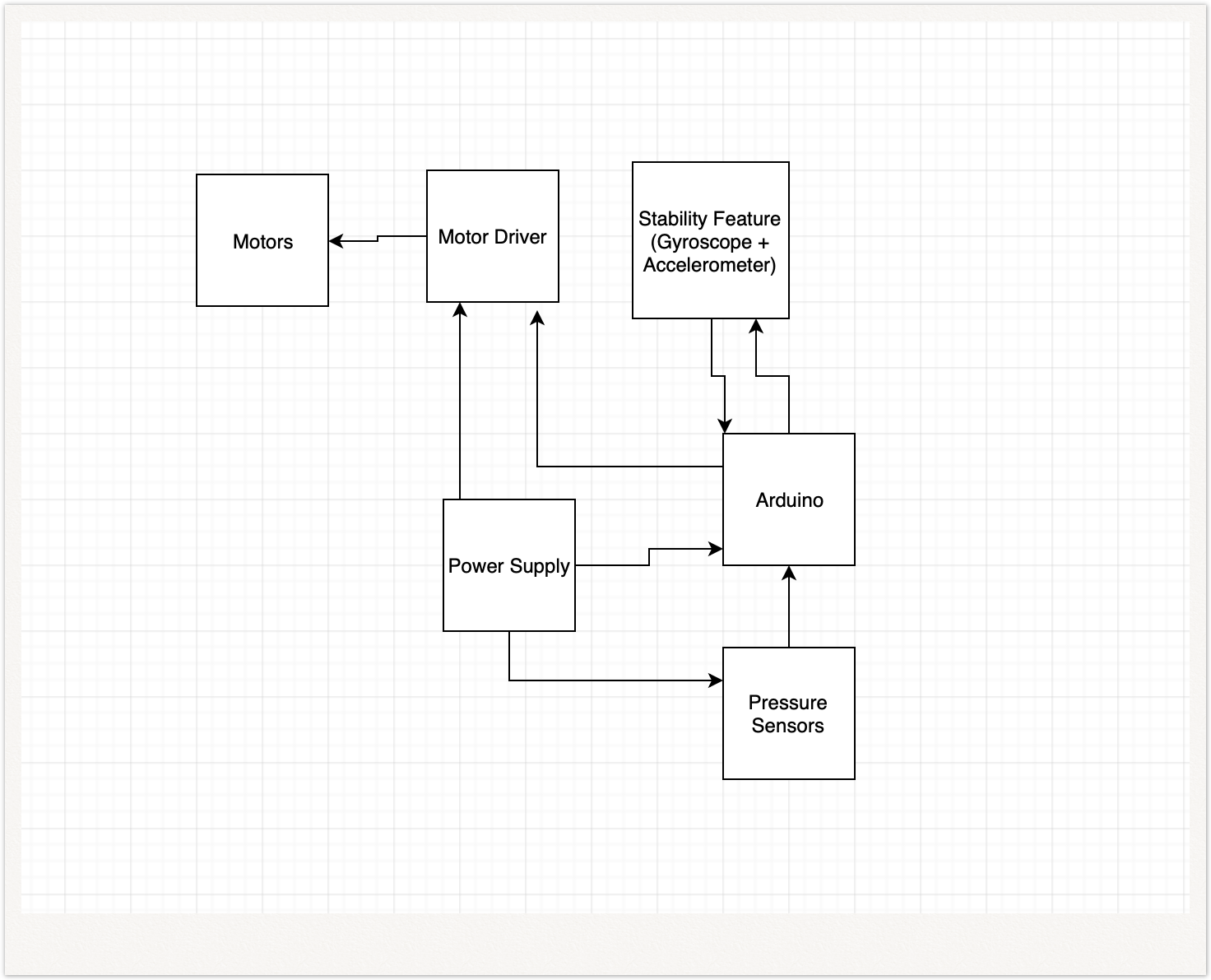
- Block Diagram / Flow Chart

- System Overview
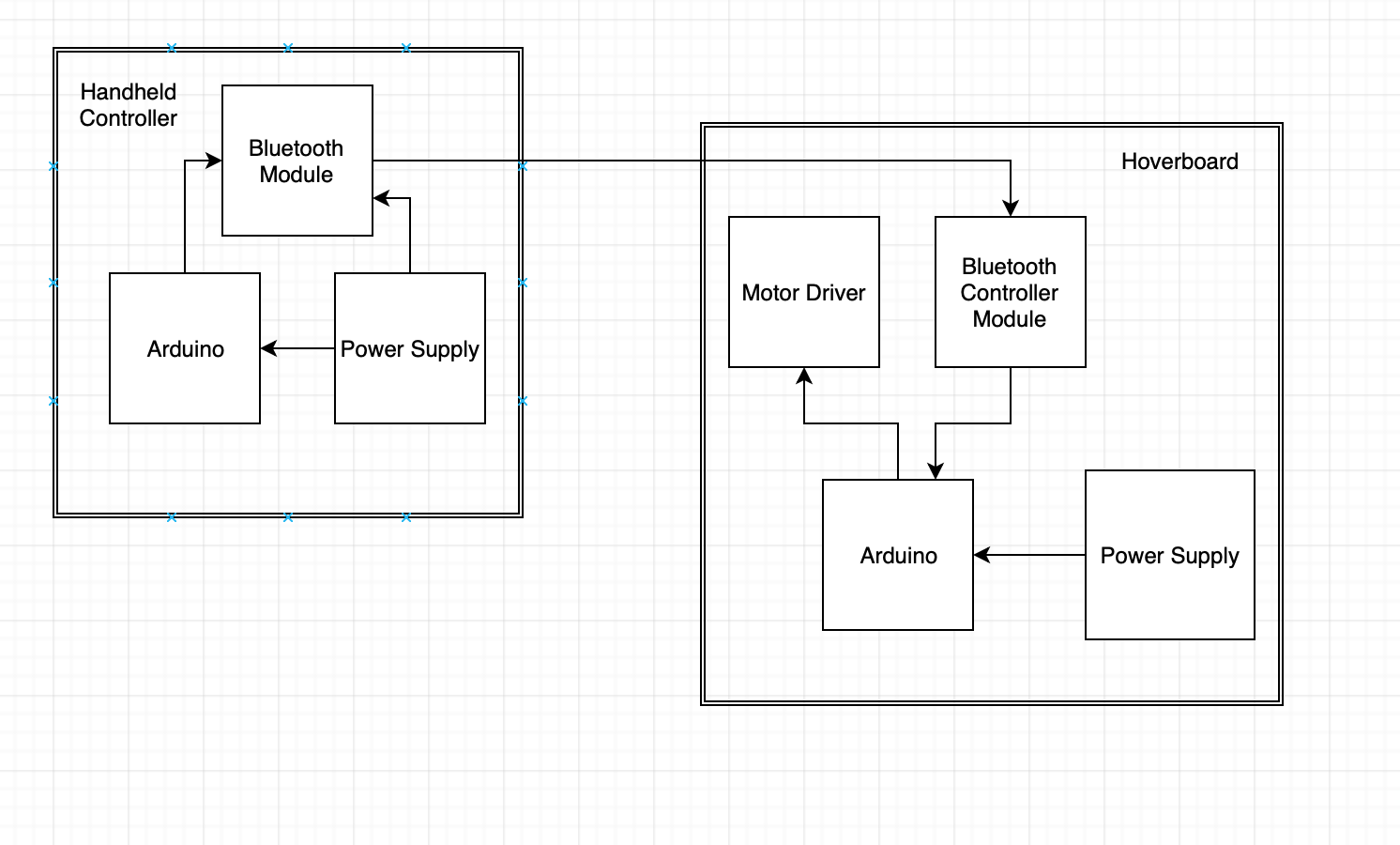
Our hoverboard will be run through an Arduino. The Arduino will be connected to a 120V electronic speed controller which will be connected to the motors. We will have a HC-05 bluetooth module connected to the Arduino for the rider to send a signal to the motor driver through a remote controller which will cause the hoverboard to accelerate/decelerate as long as the stability features are within a certain range. The stability features will be used to make sure that there isn't a sudden acceleration and overall improve smoothness of the ride (hopefully).
- Block Diagram / Flow Chart
- Parts
- Grip Tape
- Wooden longboard Deck
- Skateboard Trucks
- 80mm Flywheels
- Wheel Bearings
- 2 XX55 Motors
- Arduino
- Belt Pulley and Belt
- Riser Pads
- Car ESC
- Wireless Nunchuck
- LiPo Batteries
- FVT 120-Amp Electronic Speed Controller
- HC-05 Bluetooth Module
- Possible Challenges
The most likely challenges we will encounter will be: Not enough torque from motors to move a person, unstable/awkward movement, getting everything to work together, power usage. Part Synergy - References
Lyer, R. (2019). Arduino-Based DIY Electric Skateboard. [online] Device Plus. Available at: https://www.deviceplus.com/how-tos/arduino-guide/electric-skateboard/ [Accessed 27 Sep. 2019].
(2019). How to Build a Skateboard. [online] Wikihow. Available at https://www.wikihow.com/Build-a-Skateboard/ [Accessed 27 Sep. 2019]
{kind=link}
{kind=link}
{kind=link}