Birdal Serbest (birdals2) Sanjeev Venkatesan (stv3)
Introduction
Statement of Purpose
The goal of our project is to control a robot hand through the use of a glove with mounted sensors.
Class & Meeting Time
ECE 110 Honors Credit
Thursday 7-8 pm
Design Details
Technical Overview
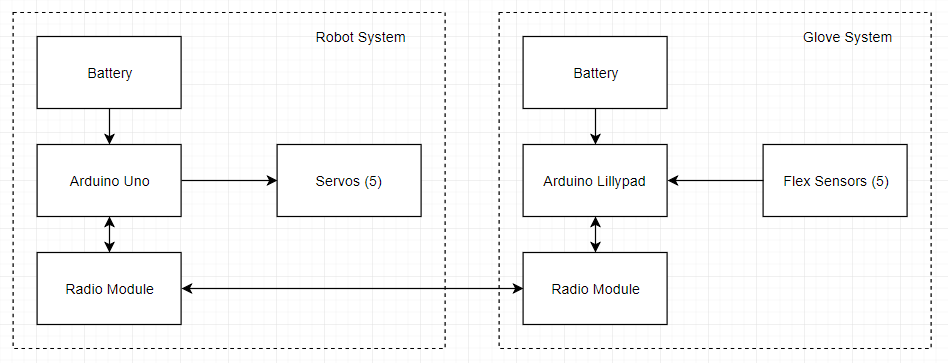
Robot System: We will purchase a mechanical hand from the internet onto which we will attach strings through the fingers and connect them to mounted servos. The fingers will bend by the rotation of the servo pulling the string and thus pulling down the fingertips. The control of the servos will be done though an Arduino that will have a connection through a radio module to another Arduino that will send sensor data from the glove system.
Glove System: This is a regular glove that will have flex sensors mounted on it that connect to a Lilypad Arduino. Those sensors will record the motion of the fingers using the sensors and the Arduino will then transmit this information to the robot system's Arduino.
Block Diagram
Possible Challenges
Some challenges that we may expect to face in the development of this device are the use of radio modules as well as the mechanical integration of the servo-string system into the purchased hand. We expect that we will be able to learn how to use the radio module by following online tutorials and datasheets, and will figure out the mechanical integration through tinkering in the lab with the parts until we get it.
The largest challenge we expect to face is mounting sensors onto the glove that will collect reliable and accurate information about the motion of the hand using it. We will work through this with research on different kinds of sensors that may be used (accelerometers, etc).
Parts Needed
- Mechanical hand
- 2 Arduino Unos
- One of these may be a Lilypad Arduino
- 5 Servos
- Glove (regular)
- 5 flex sensors
- Something like this: https://www.sparkfun.com/products/10264
- Batteries
- 9V for robot arduino
- Cell battery & Lillypad holder for glove
- 2 Radio Modules
- Probably XBee Series 1