Members: Chris Horn chorn4 ------- ECE 110
Joey Wightman jww2 — ECE 110
Introduction
Statement of Proposal
Despite the ever growing number of college students taking up biking as their primary method of transportation, there have been few technological advances for low and moderate cost bikes. Easy Bike looks to not revolutionize biking analytics, but also to employ its wide array of sensors and servos to make the riding experience more comfortable and lower effort. Easy Bike will exist to provide raw sensor data back to rider for post-ride analyzing, allowing riders, enthusiasts and professionals alike, to learn more about their riding habits and trips. Additionally, Easy Bike will have a system of advanced sensors and servos to measure the current crank RPM and automatically shift gears to minimize rider effort and maximize comfort.
Background Research
The UC Davis campus has seen a growth of bike ridership from 38% to 47% in a mere 7 years. This upward trend is not just seen on college campuses: A 2009 National Household Survey shows that nearly 12% of all trips were done a bike, up from 9.5% in 2001 . However, despite this increase in bike ridership, there are very few low-cost products available to casual riders that focus on improving the enjoyment of riding. By creating a low-cost product that both casual users and enthusiasts can enjoy will not only fill a market hole, but it will also encourage thousands of more people to bike, therefore reducing the environmental impact of automobiles. The low-cost aspect is critical, especially for the college student demographic. A feature filled, low cost product will make the commute of thousands of college students easier, safer, and faster.
Design Details
Block Diagram
|
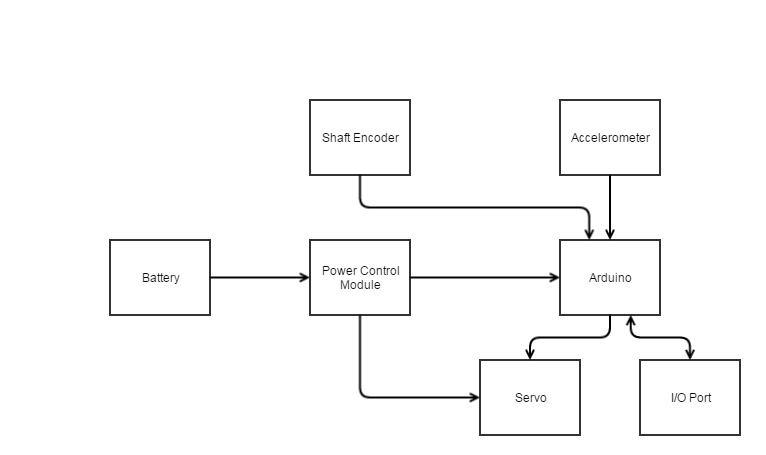
System Overview
The system will be comprised of two systems that continually share information. One part is the data gathering and analytics side. This portion of the system is driven by a microcontroller or something of similar function, and its role is to receive and process analog data from two (possibly more) sensors. These sensors are a 3-axis accelerometer and a shaft encoder. Additionally, if the data analytics is robust enough and has sufficient processing power, it will also preform on chip calculations on raw accelerometer data to calculate the riders speed (another system for tracking speed will be implemented using the shaft encoder and servo location as either an alternative or a two stage backup). The second portion of the system is the mechanical side, which has the primary role of shifting gears for the rider. This will be accomplished with a set of servos that will, upon signal from the data analytics/ primary microcontroller, move and shift gears. There are no "brains" in this portion of the system: everything is controlled from the central microcontroller, which is also managing the sensors and keeping track of everything. However, the mechanical interaction of the servos and drivetrain must be near perfect to prevent failure while riding, which would potentially catastrophic.
Parts
The parts we will need to obtain include: servos, accelerometer, RPM sensor, arduino, and a power supply with varies wires. All these parts will be installed on a already existing multi-gear bike by take into account weight distribution.
Possible Problems
Although the concepts of design are rather simple, there are many different aspects that may make it a very strenuous task. For one we need to efficiently calculate for the weight distribution of our equipment so the bike is not excessively heavy on one side or the other. Another problem we may run into is smoothly changing gears with a servo without any serious jolts as well not changing the gears to often, which we may be able to solve by time delays.
Weekly Update
Weekly updates for stuff up to this point (we will start updating regularly now):
9/30: We have shifted from an Arduino to a Raspberry Pi for improved I/O ability, improved processing power, and improved storage capabilities.
10/7: We have decided on a mechanism for the physical shifting of the gear, and are visiting the machine shop before next Friday to discuss with them about the design, and receive inputs regarding the plausibility of our design.
10/14: Solidified electronic design, and placed order for necessary sensors.
10/21: Shifted away from a rotational servo towards a linear slider powered by a servo.
10/28: Obtained accelerometer from from personal past project, as well as small circuit components.
11/04: Began to investigate a feedback system for the position of the servo.
11/11: Ran into trouble programming the accelerometer to provide an input value and that could output a value to the servo in real time.
11/18: Due to excessive trouble with building a system with the accelerometer and time constraint we are looking into an alternative input.
12/02: Finally settle on the approach to fully finish the project.
Report
References
"Who’s Walking and Bicycling," in Pedestrian and Bicycle Information Center. [Online]. Available: http://www.pedbikeinfo.org/data/factsheet_general.cfm. Accessed: Sep. 23, 2016.
{kind=link}
{kind=link}
{kind=link}