| Name | NetID | Section |
|---|---|---|
| Irene Chen | qingyun6 | ECE 110 |
| Xiping Sun | xipings2 | ECE 110 |
| Zhichao Jiang | zhichao9 | ECE 110 |
Statement of Purpose
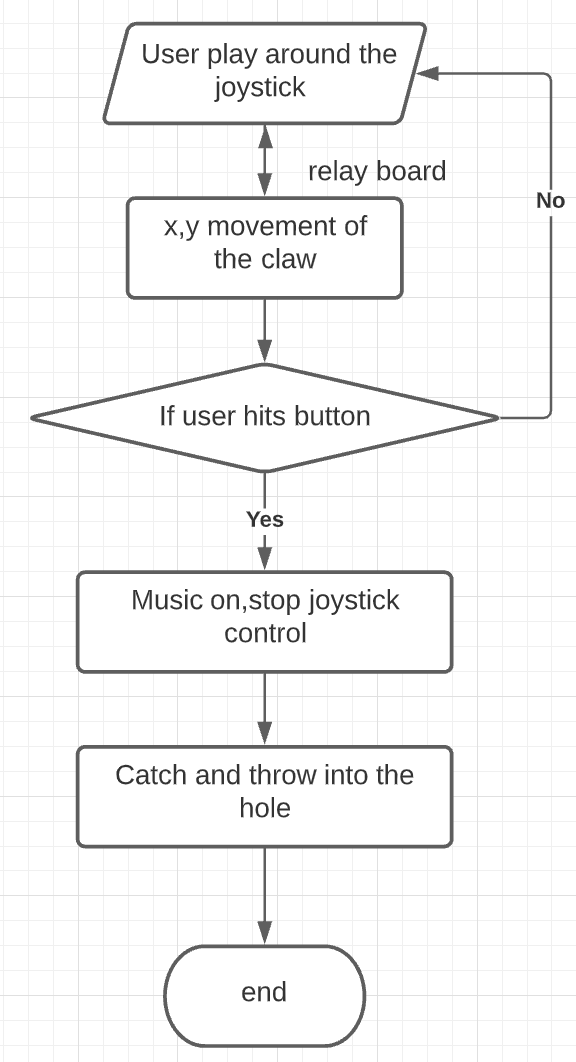
Doll crane machine is basically a box with a claw inside that can catch dolls. We plan to make one, with reference to that in shopping malls. Players can control the position of the claw using a joystick. By hitting the button, players can grab the dolls using the claw.
Background Research
Our inspiration came from doll machines in shopping malls. They are often programmed so that the claws cannot hold the dolls tightly. It can be really disappointing if no dolls are caught after several attempts. Instead of playing with doll machines in shopping malls, we decided to make one by ourselves. After watching some videos on youtube, we discovered that we might need several motors to control the claw's movement in x, y and z directions respectively.
Block Diagram / Flow Chart
Procedures :
- Build 2 cuboid frames with 18 battens and join them together
- Build 2 smaller cuboid frames with 9 battens
- Construct 2 battens with 1 wheel and 1 motor on each side (for x-direction movement)
- Connect the claw with two motors and gear wheels to control the y and z-direction movement
- Connect the motors to the relay board
- Attach limit switch to the claw
- Connect the push button and joystick to relay board
- Connect the push button and joystick with raspberry pi
- Programming using raspberry pi
- Use AC-DC converter and flyback DC-DC converter to power this circuit
System Overview
Parts
Possible Challenges
Building the circuits can be one of our possible challenges. We plan to make the machine able to recognize dolls, through AI image recognition, if we have time at the end of the semester. This can be a great challenge.
References
List all references you used in your proposal. This is important, you do not want to be blamed for plagiarism. IEEE citation format is highly recommended. You can use citethisforme.com's IEEE citation generator to painlessly generate your references in this style.
https://tutorials-raspberrypi.com/raspberry-pi-joystick-with-mcp3008/
Attachments:
{kind=link}
{kind=link}
{kind=link}
Comments:
|
By batten, do you mean a 2x4, or just a wooden plank? Also, please include vendors and prices for your parts. |
|
Where should we send our shopping list? |
|
Hey! I like the project idea but I would like to see you list the price of the parts you are ordering, along with the vendors and specific part names/numbers. If you add that, I will approve your project. Keep in mind the 110/120 requirements for a project. Have a plan to include either a sensor or digital logic for each requirement, respectively. |
|
The budget is $150, so your current parts list (at 297) is a problem. (also you don't have links to the places we can purchase these) That being said, there's a lot of things we can improve: Do we need to purchase a $45 claw? Here's a $15 I found by googling "Servo claw" We have DC power supplies in the lab, I recommend you use those since your project is largely stationary. Why do we need a flyback transformer?
|
|
Hi! Is it $150 per group or per person? A new member has joined us today. The claw is $45 because it is claw assembly, which includes everything we need. The $15 one does not have a solenoid and wires. Probably I won't need the DC power supply. I need the flyback transformer because the relay board is 5V, but the claw is 24~48V. It seems like every device in this project requires a different DC voltage supply, so I might want to use a DC-DC converter to change voltages. |
|
Also the links are in an excel file. I don't know if we can attach an excel file or not on this wiki page. |
|
Per group, sorry :/ You're right, the claw I linked doesn't include a servo, but I'd still suggest we don't need to spend $75+ on a claw + transformer for the claw |
|
Please set the permissions and link it here |
|
|
|
One way to avoid transformers I believe is to use several DC supplies with different output voltages. But I'm not sure whether we have enough DC supplies. Unfortunately even if I don't need the transformer and the DC supply, it's still far beyond $150. : ( |
|
For a lot of your parts (e.g. crane machine wheels, gear wheels, etc.), can you consider using CAD to design alternatives and 3-D print them? You might be able to save enough money to get your proposal approved |
|
Project Approved Group # 41 |