Name | NetID | Section |
|---|---|---|
| Gabriel Valles | gvall4 | ECE 110 |
| Scott Lopez | slope22 | ECE 110 |
Statement of Purpose
The purpose of this project is to create and amphibious vehicle (DUKW) that is controlled by an Arduino. It will be controlled by a person and switch between drive using a and gate to switch between drive types. We are still in the process of thinking of other gates to implement.
Background Research
We first had to search up what a DUKW was. A DUKW is "an amphibious version of the 2-1/2 ton General Motors cargo truck. It was developed by the U. S. Army during World War II as a means to deliver cargo from ships at sea, directly to shore"[1]. Our group found this vehicle to be quite interesting that a cargo truck was retrofitted to be an amphibious vehicle so we decided to build it as our project. This project is a continuation of last semester so not much has changed except for an implementation of gates
Block Diagram / Flow Chart
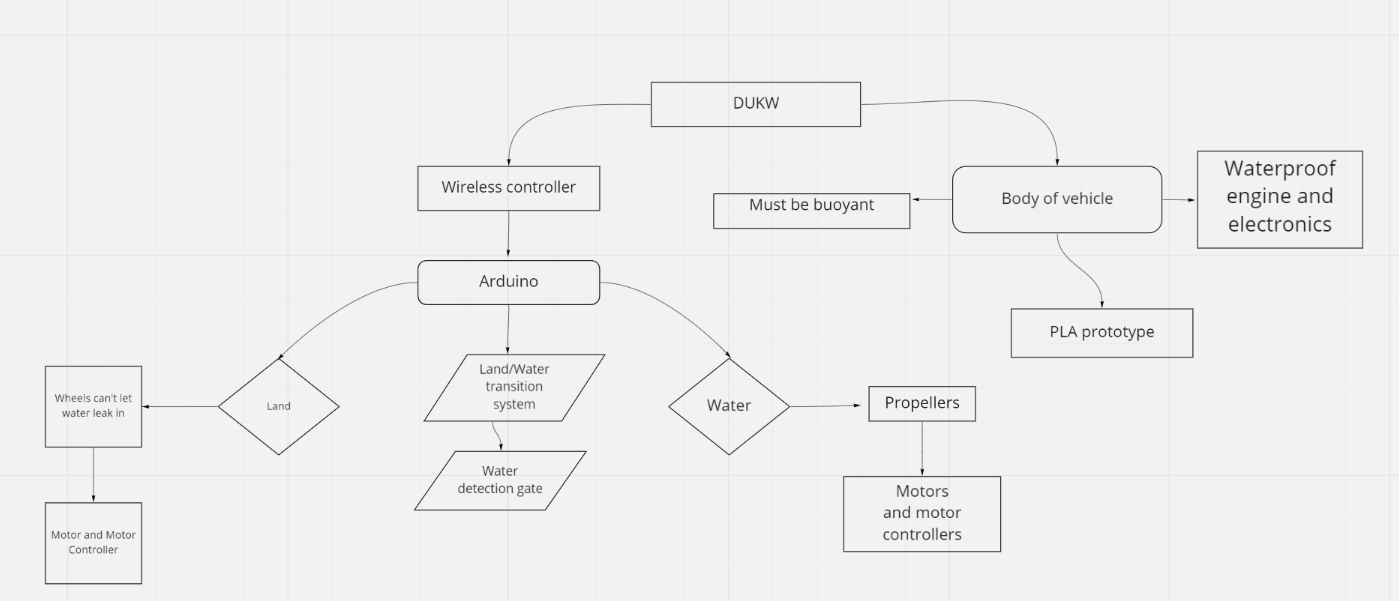
System Overview
We are splitting the design process of our project into two major sections. The electronics/Arduino section and the physical body of the DUKW. The Arduino part is further divided into the land control, water control and water/land transition. We plan to have two propellers so that we can control the direction of the DUKW in the water. Some other electronic parts that we are going to need include motors, motor controllers , a battery and a battery charging circuit. At first we will CAD a buoyant design for the body and 3d print it.
Parts
Provide a list of parts that you may need for your project. You should include details such as the quantity, model number, purpose, vendor, and price (excluding taxes and shipping) for each part. This list may change as you work on your project.
Possible Challenges
- One design challenge will be sufficiently waterproofing all of the DUKW's internal electronics. It's very easy to accidently look over multiple little wire splices/connections, so it is very important that our groups goes over all of the components in our system to make sure they are all safely waterproofed.
- The second design challenge will be properly setting up the DUKW so that it will seamlessly go from operating on land to water and vice versa.
Notes
We will implement a logical gate system to detect water and change drivetrain methods from wheel to propeller when a specific button on the wireless remote is detected.
References
List all references you used in your proposal. This is important, you do not want to be blamed for plagiarism. IEEE citation format is highly recommended. You can use citethisforme.com's IEEE citation generator to painlessly generate your references in this style.
[1]"Motor Transport Corps", Web.archive.org, 2021. [Online]. Available: https://web.archive.org/web/20080725043610/http://www.transchool.eustis.army.mil/Museum/DUKW.htm. [Accessed: 16- Sep- 2021]
[2]Pmengineer.com, 2021. [Online]. Available: https://www.pmengineer.com/articles/95528-sensaphone-water-detection-sensor#:~:text=The%20Sensaphone%20zone%20water%20detection%20sensor%20detects%20the,of%20water%20rope%20to%20cover%20a%20large%20area. [Accessed: 16- Sep- 2021
[3]"Underwater Thruster, ROV Thruster, AUV thruster", Lianinno.com, 2021. [Online]. Available: http://lianinno.com/underwater-thrusters/. [Accessed: 16- Sep- 2021]S. Thone, “Converting a Bilge
[5]"Pump to Run a Propeller,” Homebuilt Rovs. [Online]. Available: http://www.homebuiltrovs.com/howtobilgeconversion.html. [Accessed: 01-Oct-2021].
{kind=link}
{kind=link}