
Creators (ECE 110)
Haley James – haleymj2@illinois.edu
Samuel Weiss – sjweiss3@illinois.edu
Initial Project Proposal
Introduction
1.1 Statement of Purpose
We aim to construct a platform to survey and digitalize objects using a quadcopter drone and an instant 3D scanner. The two of these provide their own unique challenges so they have been split into two projects. This page is dedicated to the development of the drone. We would like to construct a quadcopter from "scratch" and then use our programming skills and experience to develop a control system for the drone. Once both parts are complete, we hope to use this device to scan different objects using the drone.
In the case that both projects are too intensive to complete and then combine, both groups are prepared to make them standalone endeavors.
1.2 Background Research
Our research began with an investigation of LIDAR to understand the role the drone will play in the scanning. According to NOAA, LIDAR stands for Light Detection and Ranging and is commonly used by them to map geographic elements or natural weather formations with relative accuracy. Similarly, they will often use helicopters or planes to record this information. In order to output the right type of data thought, they require a laser, a scanner, and a specialized GPS. This identifies the goal that we need to have an accurate GPS system installed on the flight side of things as well as the scanning to produce good results.
When it comes to the actual at-home creation of the drone, it is good to find instructions similar to how you would approach the build. This blog by Jack Brown on MyDroneLab.com was well-laid-out for our understanding and gave some general guidance on the build including the type of materials and different tips like the free testing software offered. Luckily, there are much more detailed quadcopter builds like the more detailed guide by Chris Schroeder for when we get into the construction phase.
This project is of importance because only now are we beginning to see the implementation of drones in our society. As an example, here you can see a video of a Chinese drone warning citizens who may be at risk or pose a risk to the public by being in the open without proper Personal Protective Equipment. The creation of a scanning system would also be a good use of the technology as it can be used by a variety of consumers and in the process, educate us about where drone piloting meets virtual reality and recognition software.
Design Details
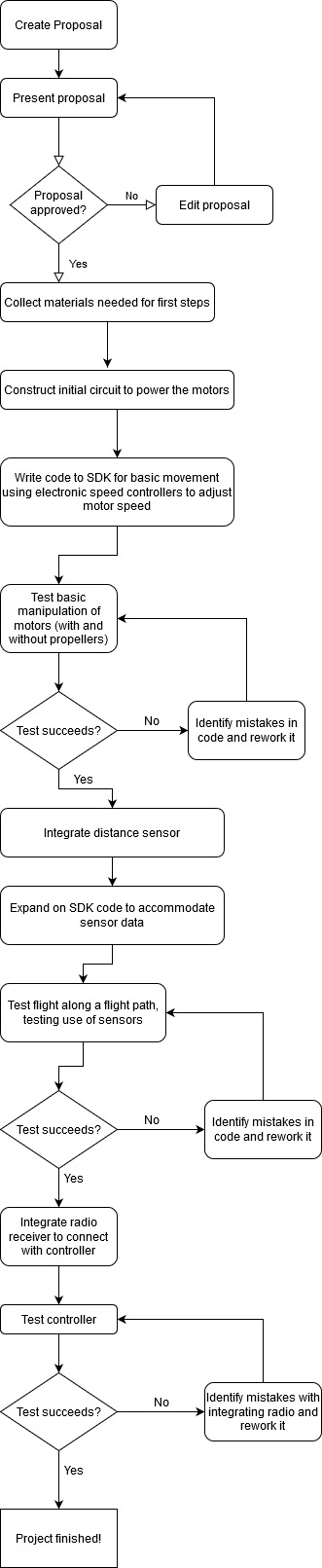
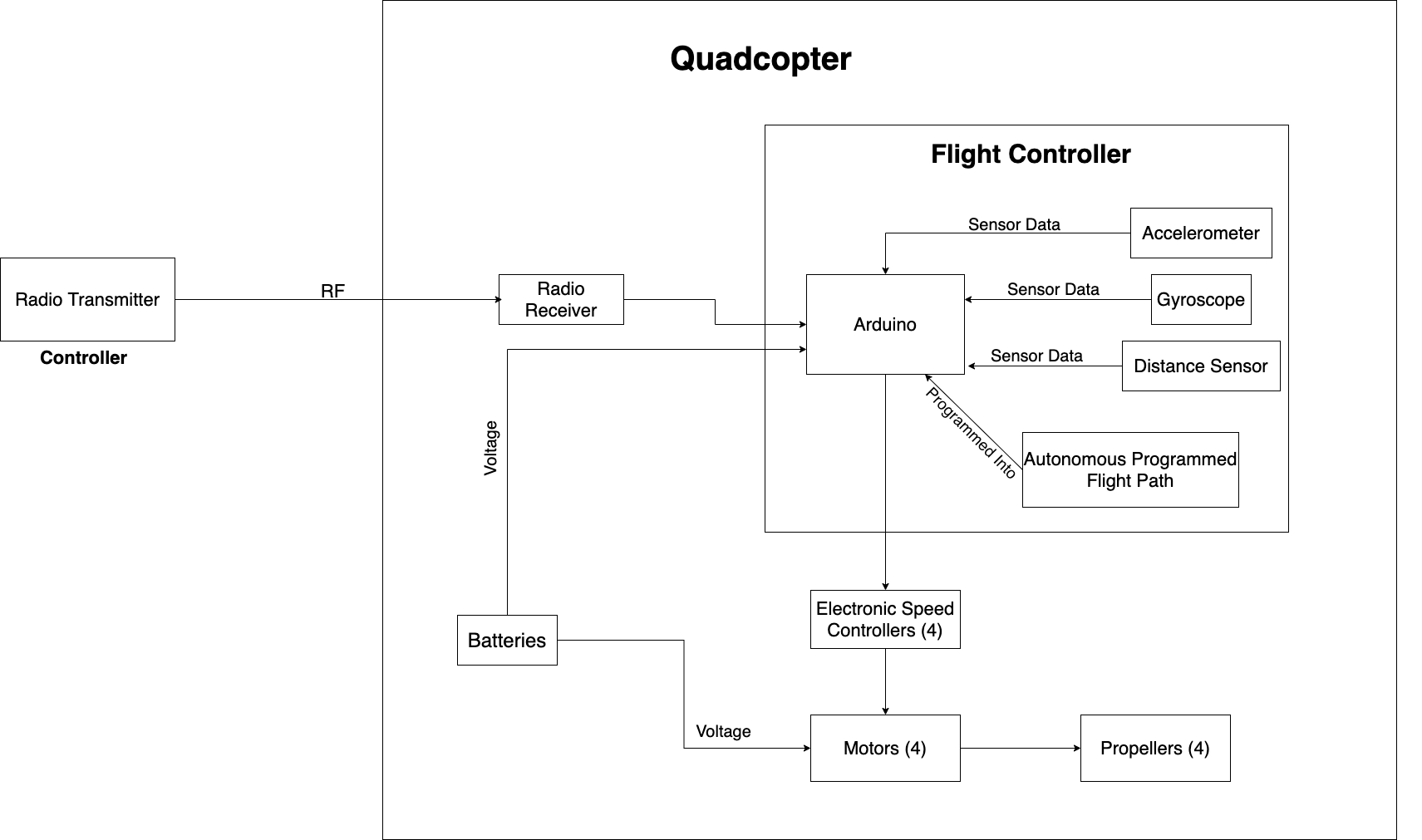
2.1 Block Diagram & Flow Chart

2.2 System Overview
Radio transmitter: Located in the controller (separate from the drone), this will allow for a user to control the movements of the drone in real time.
Radio receiver: Located in the drone, this will receive signals from the transmitter, sending it to the flight controller, which controls the movements of the drone through the electronic speed controllers.
Batteries: Provide power to the flight controller and to the motors which are connected to the propellers.
Flight Controller: A pre-programed component which controls the electronic speed controllers and includes sensors such as an accelerometer and a gyroscope for calibration purposes. The particular flight controller that we will be using is the OMNIBUS F4 Nano v6 with LC filter, which is an ArduPilot-supported controller, which means that it will be accessible via SDK.
Software Development Kit (SDK): The software development kit will allow for us to adjust the flight controller's capabilities, add in pre-programed flight paths, and interact with other sensors.
Distance sensor: This sensor will be able to judge the distance between the drone and surrounding objects. Using the SDK, we will program the flight controller to stop the drone if it gets too close to surrounding objects. Additionally, the sensor will assist in the landing of the drone, so that the drone can slow down its descent when it gets closer to the ground to soften its landing.
Autonomous programmed flight path: Until we have the controller for the drone set up,we will use the SDK to program a flight path to the flight controller to navigate the drone autonomously.
Electronic speed controllers: These will be controlled by the flight controller and will manipulate how the motors run.
Motors: These motors will be attached to the propellers, and their speeds will be controlled by the electronic speed controllers.
Propellers: Attached to the motors, they will spin and create lift for the drone.
Parts
Component | Quantity | Price | Notes |
|---|---|---|---|
Motors | 4 | 67 | Come with propellers but recommended to buy others |
Propellers | 4 | 14 | |
| Frame | 1 | 19 | Made of glass fiber and polyamide-nylon |
| Flight controller | 1 | 40 | Will be ordered from myairbot.com |
Radio transmitter | 1 | 55 | |
4 in 1 Electronic speed controller | 1 | 30 | Will be ordered from myairbot.com |
Batteries | 2 | 18x2 | 14.8V 1300mAh 100c |
Power distribution board | 1 | 0 | Comes included with the frame |
Charger | 1 | 9 | |
| Distance Sensor | 1 |
Here, we have created a spreadsheet tracking our current parts.
Possible Challenges
Possible challenges for building this drone will mostly surround putting the parts together and connecting the systems so that they function uniformly in the task of flight. The budget is also something important to keep in mind as drone parts can get somewhat pricey fairly quickly. Additionally, if all goes well with the assembly, we hope to experiment with the SDK to see if we can implement pre-programmed flight maneuvers.
References
Note: All photos borrowed from sources are identified upon clicking on the selected image via a URL at the top of the screen.
Brown, J. (n.d.). How to Build Your Own Drone: Step-by-Step DIY Homemade Project. [online] My Drone Lab. Available at: https://www.mydronelab.com/blog/how-to-build-a-drone.html [Accessed 15 Feb. 2020].
Oceanservice.noaa.gov. (2020). What is LIDAR?. [online] Available at: https://oceanservice.noaa.gov/facts/lidar.html [Accessed 15 Feb. 2020].
Schroeder, C. (n.d.). Sturdy Quadcopter Build. [online] Instructables. Available at: https://www.instructables.com/id/Sturdy-Quadcopter-Build/ [Accessed 15 Feb. 2020].
Revisions
20FEB
- 1.1 Statement of Purpose updated to include the possibility of two projects not combining
- 2.1 Block Diagram & Flow Chart updated to show a new design using a premade flight controller
- 2.2 System Overview now includes new parts
- Parts list reflects current pricing and Amazon wish list for project (fight controller is still being determined)
- Possible challenges revised to focus on assembly challenges and SDK tinkering
- Instead of building our own flight controller, will be buying one, and using an SDK to configure it
{kind=link}
{kind=link}