Creators:
| Name | NetID | Course |
|---|---|---|
| Anshuk Chigullapalli | anshukc2 | ECE 120 |
| Myron Liu | mironl2 | ECE 120 |

Project Log (Lab dates bolded, external deadlines in red)
| Date | Update description/planned internal deadline | Additional notes |
|---|---|---|
| 2/14 | Project proposal due | Submitted |
| 2/17 | Feedback received: "Start with scaled down model with 1 DoF using just one aiming servo (LR)" | If we have time, we will implement second aiming servo |
| 2/20 | Proposal revisions due | Submitted |
| 2/25 |
| |
| 2/25 | First round of parts for ordering due | Facebook Market Place: Nerf Guns Amazon: Arduino Sensor Shield, 6-cell AA battery holder, Arduino-compatible RGB LED strip, Arduino Audio Module, Webcam, ECE Supply Center: 3x HS-311 Servos ECE Honors Lab Supply: Arduino Uno, Desktop Speakers |
| 2/27 |
| |
| 3/3 | Second round of parts for ordering due | |
| 6/7 | V sad, project postponed until further notice due to COVID |
Introduction:
Statement of Purpose
The purpose of this project is to build and program a nerf turret that is capable of aiming and firing foam darts atPurdue studentstargets using computer vision in automated mode or manually. The project will also have additional setting options to demonstrate logic gates for multiple choices.Background Research
Both of us are actually Aerospace Engineering majors, and we are involved in a few aerospace RSOs (Ilinois Space Society, Student Space Systems). So, our original idea was to create something aerospace related that we can apply to future projects of ours. The main thing we were considering was actuating flaps that can control the flight of a mid-power rocket. This would be a pretty challenging and interesting project, with a lot of sensors and control software (which is the reason why Anshuk even started a CE minor, to learn more about micro-controllers).
But then, Myron came up with the brilliant idea of doing something completely random: an Autonomous Nerf Turret. It was simple, fun, but also absolutely useless to our major. So we had a choice to make.
After spending many minutes deliberating over the practicality of an aerospace-related project versus the stupid and simple Nerf Turret, we decided: “Hey, we’re doing very similar fun aerospace stuff with our RSO anyway, why not go for something simply for the fun of it?”. The Autonomous Nerf Turret it is.
We have done some research to see if anyone’s done this before, and we actually found a video by famous YouTuber “LinusTechTips” and he did a very similar project in one of his videos.
https://www.youtube.com/watch?v=Xz5ZvW98HRsThough we won’t follow the video exactly, it offers helpful advice.
There is also “Project Sentry Gun”, which offers open-source software for computer vision.
https://sites.google.com/a/rudolphlabs.com/project-sentry-gun/
Design Details:
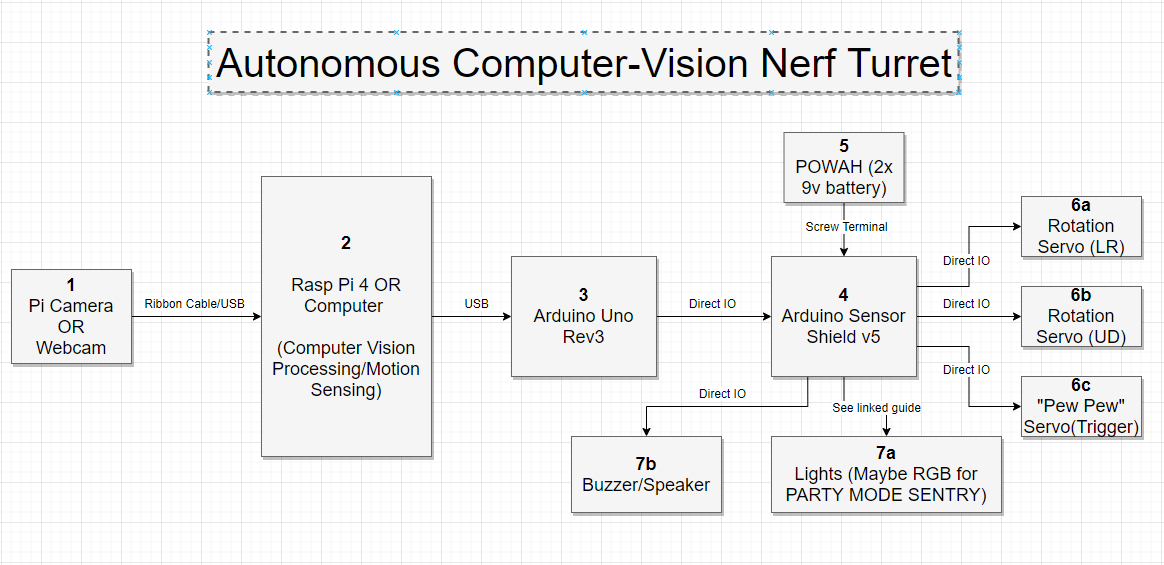
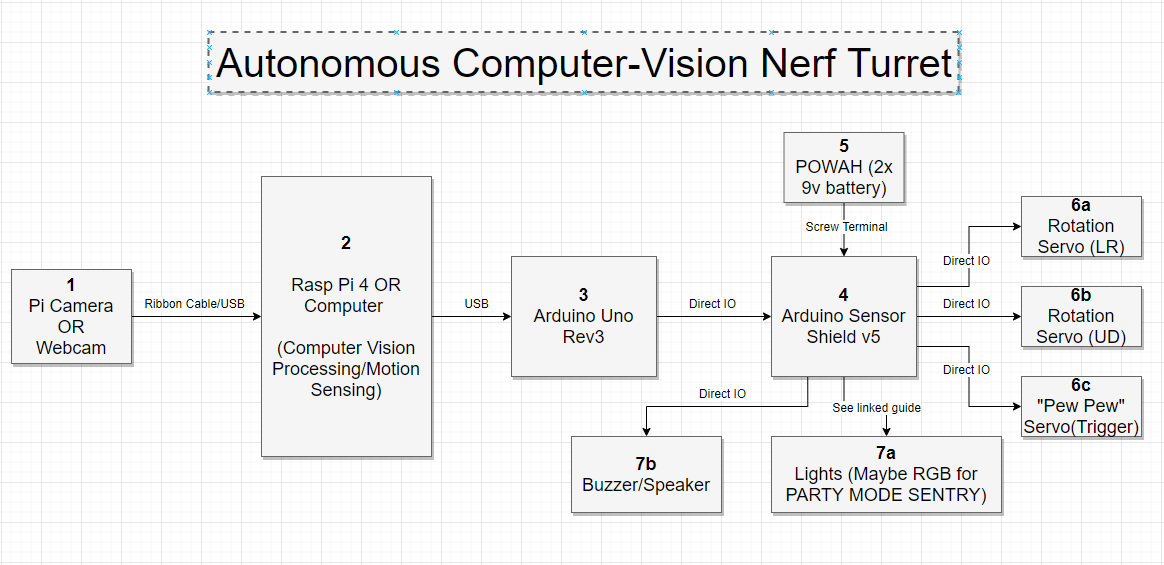
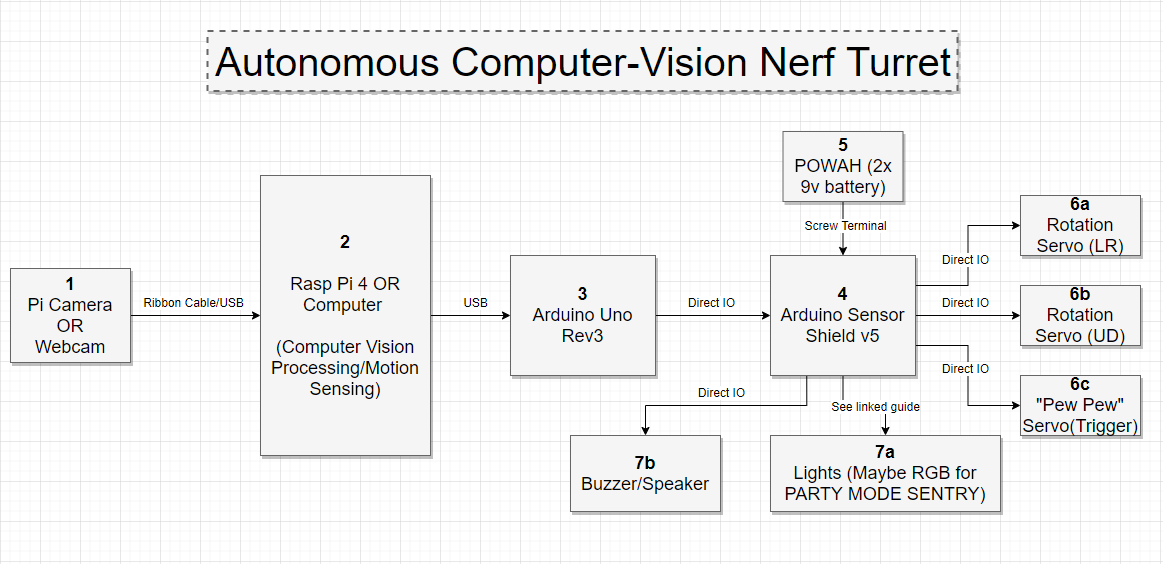
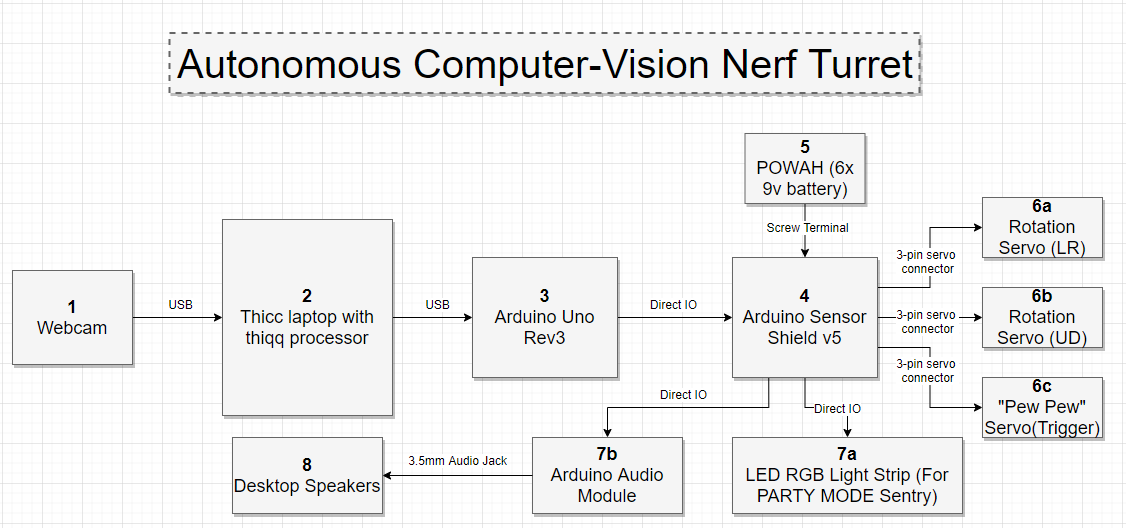
- Block Diagram (Updated 2/26 1:04 AM)

System Overview
1
Webcam Visual Feed
2
Laptop Computer
Computer vision processing
3
Arduino Uno
Digital to analog signal conversion to servos and other hardware
4
Arduino Sensor Shield
Drives servos and sensors and serves as power-board
5
Battery
UNLIMITED POWAH (jk just a 9V)
6
Servos
Servo for rotation, tilt, and trigger actuation
7
RGB LED Strip
Visual-cue system (and also RGB fun
 )
)8 Audio Output System Audio-cues (For the meme: crab rave while firing?)
Parts (UPDATED 2/25 11:32pm):
Parts link: https://docs.google.com/document/d/10PkneD2TWyn31gGOQhSQYe1eh-jXBFUl6k6-3ngzplU/edit?usp=sharing
Possible Challenges:
- Structural design: The whole mechanism must work with fluid motions and should be compact. Wires shouldn't impede actuation. The computer and camera module must also be integrated properly with the rest of the system.
- Making sure that the open-source code that we take is properly integrated with the code that we write, and it all works together. An important component of this is understanding the open-source code well.
- The electrical nerf gun's trigger switch will have to be connected to our software and we should have control over it.
References:
- LinusTechTips video on Autonomous Turret:
- Website for open-souce code: https://sites.google.com/a/rudolphlabs.com/project-sentry-gun/
{kind=link}
{kind=link}
{kind=link}
{kind=link}