By: Kartik Mehra (kartikm3, ECE120), Mukhil Umashankar (mu9, ECE110), Aumkar Renavikar (aar8, ECE110)
1) Introduction
Statement of Purpose
Our group’s goal is to build an automatic pet feeder as two of our group members have a pet. Although automatic pet feeders are already available in the market, most of them are quite expensive and rarely come with a highly customizable and functional mobile app. Our goal is to make a pet feeder which is connected via the internet to your phone and allows you to have many customizable features like time of feed, number of servings, etc.
Background Research
We have found many such similar projects with different designs using either an arduino or a raspberry pi. With the arduino, we would need a crystal oscillator to measure the time whereas with the raspberry pie, the realm of possibilities is expanded through the functionality offered through an internet connection. We have seen automated mechanisms built into mechanical feeding machines and also into a mechanism which has been built from scratch. We want to use an on-the-shelf mechanical feeder and make it automatic as our focus is more on the circuits and software. There are many different mechanisms to release the food but we are leaning towards helical corkscrew as we think defining quantities using software will be most intuitive using that. A flap was also a possibility but that makes it harder to get precise quantities.
2) Design Details
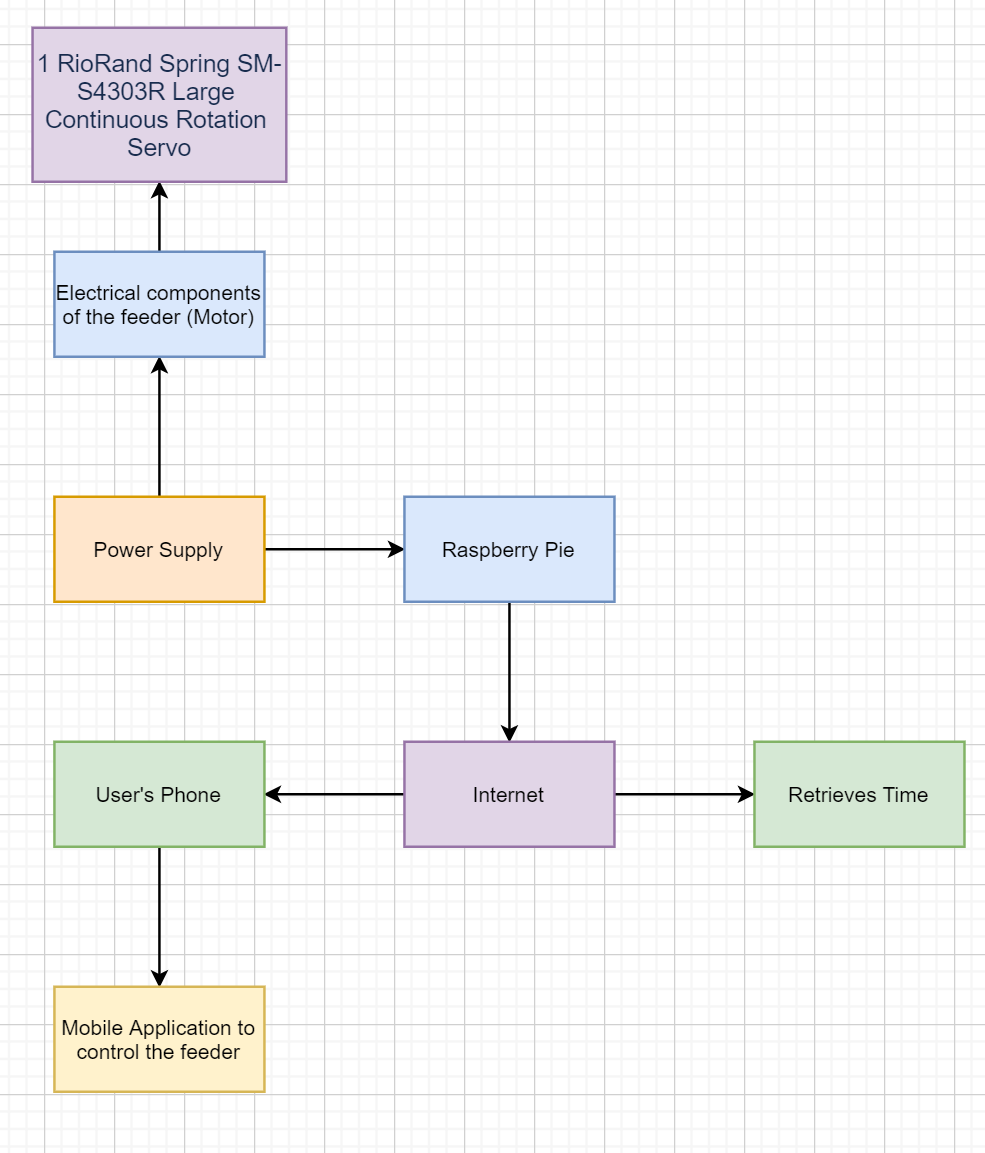
Diagram / Flow Chart
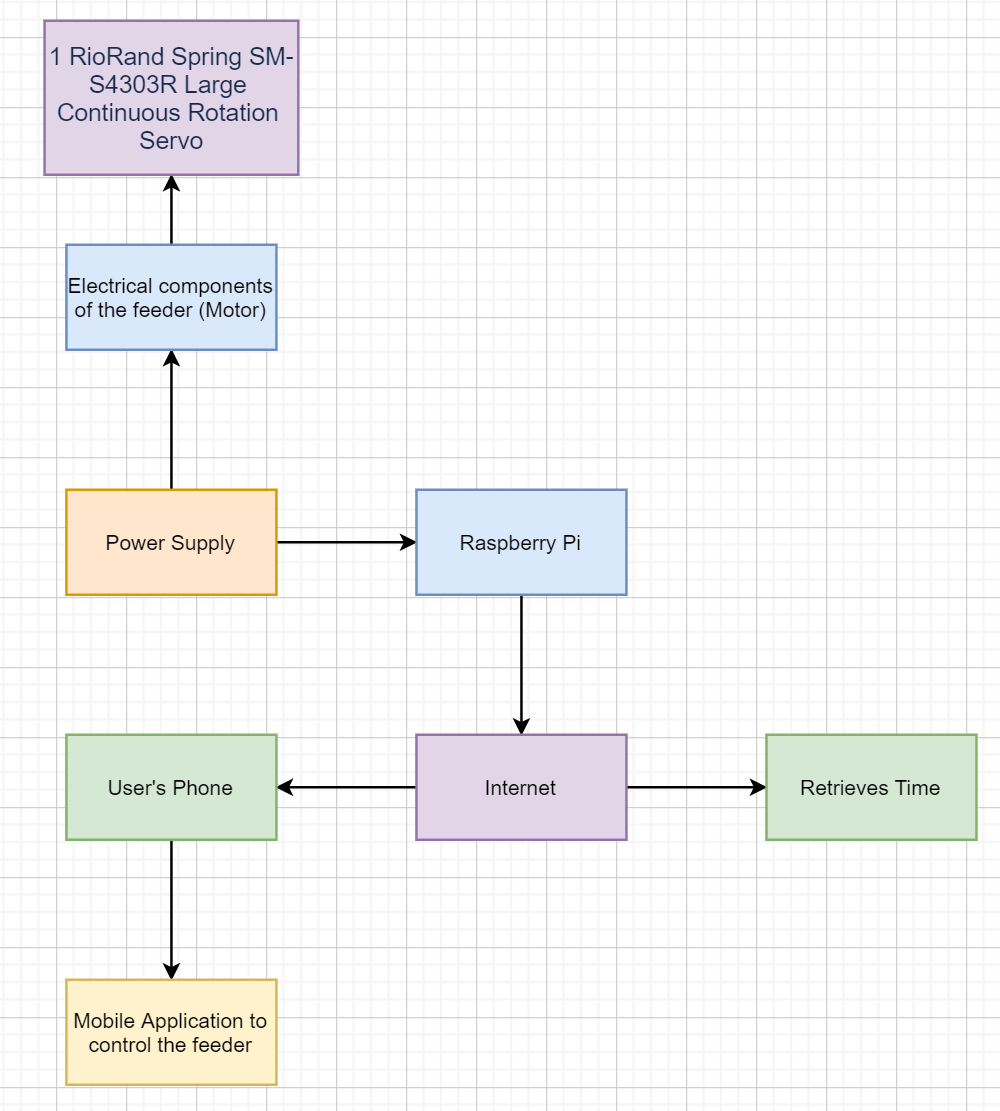
System Overview
The power supply connects the two main components of the automatic pet feeder: the electric circuitry and the raspberry pi. All of the electric circuitry ensures that the pet feeder works as it is supposed to, allowing the servo motor to work seamlessly such that the food is dispensed at the correct time. The second crucial part that the power supply connects is the Raspberry Pi, which then connects to the internet. The internet connectivity allows the retrieval of real time which can be used to program when the food needs to be dispensed, and also can be used to access the information that the user provides on the mobile application, allowing the user high level of customization for the automatic pet feeder, such as setting a specific time to feed, the amount to feed and other such functionalities.
3) Parts
1 RioRand Spring SM-S4303R Large continuous rotation servo - https://www.amazon.com/gp/product/B00X7BPI1K | If unavailable on Amazon: https://www.pololu.com/product/1248. The above specific model as it fits with the food dispenser being used
1 ZevrO Honey-Can-Do Dry Food - https://www.amazon.com/gp/product/B00013K8O4/
1 Raspberry Pi 3 model B
1 Raspberry Pi power supply
1 16GB microSD card for the Raspberry Pi - https://www.amazon.com/SanDisk-Ultra-MicroSDHC-Memory-Adapter/dp/B073K14CVB/ref=dp_ob_title_ce
Breadboard
3 Male to female jumper cables
Few 1’’ dowels
Wood glue
1 2’’ Carriage bolts with nut for stand
Wood pieces to support structure where necessary
Resistors of varying resistances
Wires of varying lengths and colors
Estimated cost- $70
4) Possible Challenges
We feel the list of parts necessary for the automatic pet feeder could change over the course as we better understand the project. However, these additions should be very minor and should mostly concern supporting the physical structure.
We hope to control the pet feeder through an app and have various features on it that changes the food quantity fed, frequency of feeding etc. For some of us making such an app and establishing the connection to the feeder is something new, so we may find it challenging to implement the features proposed.
Specifications and sizes of the parts listed. Our parts for the mechanical part of the lab is based off another individual who had done an automatic pet feeder. We are hoping the sizes of the specific model of the parts he had used ‘fit’. Otherwise we will need to look for an alternative and make changes to the physical design ourselves with our own choice of specific parts and sizes.
5) References
Rob's Raspberry Pi Powered Pet Feeders. (2017, November 27). Retrieved from https://www.robpeck.com/2017/11/robs-raspberry-pi-powered-cat-feeders/
Instructables. (2017, October 2). Internet Enabled Raspberry Pi Pet Feeder. Retrieved from https://www.instructables.com/id/Internet-Enabled-Raspberry-Pi-Pet-Feeder/
StorinoHi, S. (2019, September 16). Automatic Cat Feeder Using the Raspberry Pi. Retrieved from https://storiknow.com/automatic-cat-feeder-using-raspberry-pi/
Attachments:
{kind=link}
Comments:
|
I like your idea and from your proposal, it seems you guys are off to a good start. If you haven't done mobile app development before, perhaps you can create a website that's hosted off of the raspberry pi and control it that way? You would be able to access it both on a computer and a phone. Also, it looks like the RioRand servo you mentioned in your parts list is unavailable on Amazon. Please try to find an alternative source or another servo that fits your project's needs. |
|
Great project! One of the past project uses a pressure sensor that determines how much food it dispenses. It is still in the lab, so if you are interested in checking it out, just let me know! |
|
Looks good, and looks like you guys have done your research. Let me know if you have any questions. |
|
Great parts list and good focus on how you want this automatic feeder to dispense. Also it will probably help sticking to a single dry food of your choice so make sure it is easily available. Nice work and concise summary! |
|
Happy to see you are considering the app! Let me know if you need any help with that aspect! "With the arduino, we would need a crystal oscillator to measure the time whereas with the raspberry pie, the realm of possibilities is expanded through the functionality offered through an internet connection." <https://create.arduino.cc/projecthub/jeffpar0721/add-wifi-to-arduino-uno-663b9e> You can have wifi on arduinos if you want to. "leaning towards helical corkscrew" I agree that this is probably a best approach. You don't have to worry about servos in this case and can just say "run motor for n seconds" |
|
Approved, Feb 20th |