| Name | NetID | Section |
|---|---|---|
| Abalus Awudu | pawudu2 | ECE 120 AL5 |
| Nicholas | ntw5 | ECE 110 AB |
| Xavier Contreras | xavierc2 | ECE 110 |
Statement of Purpose
Our goal is to create a self-driving boat with the ability to avoid obstacles.
Background Research
As many new vehicles or everyday items have become automated like vacuums and cars our group has taken a look at boats. Inspired from Tesla's self driving car we wanted to create a boat that has the capability to drive itself. Like a tesla car we want to build a boat that can avoid objects in its surroundings to avoid collisions. Although our boat will be the size of a normal RC, the idea of a boat that can avoid objects on its own has large implications on preventing collisions with other boats and people. We have looked at the creation of RC boats as well however our boat will also be able to drive itself or be controlled by a remote.
Block Diagram / Flow Chart
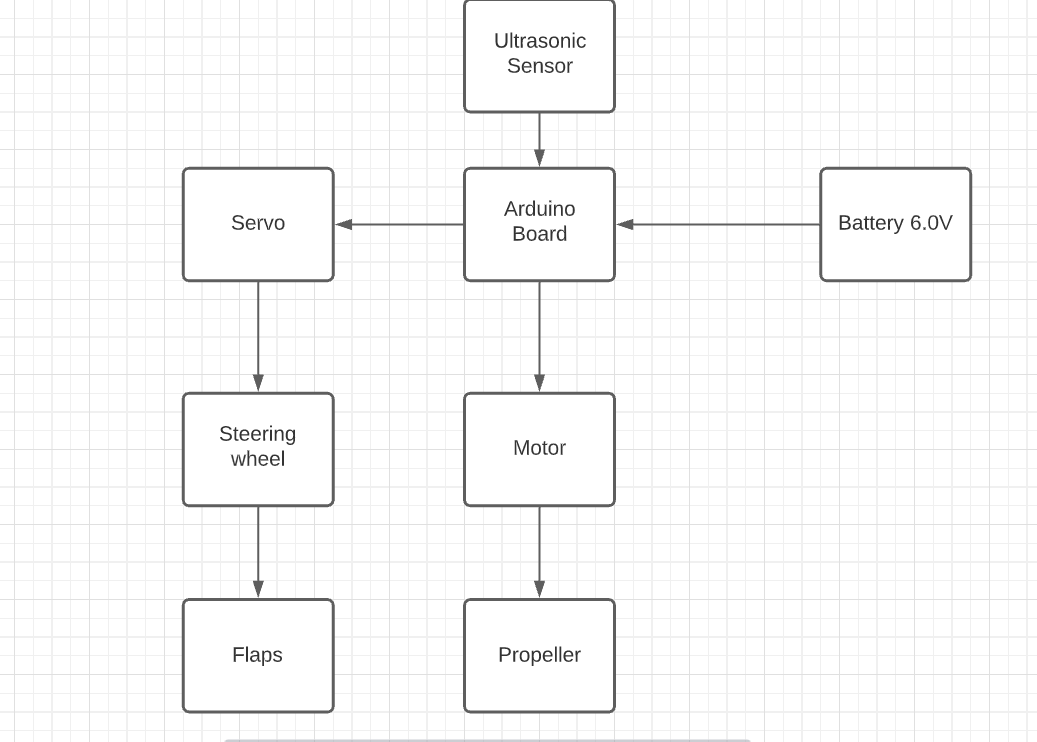
System Overview
- We have a battery that connects to the Arduino board. From the board, there is a motor connection that controls the propeller. Also from the board, there is a sensor that then connects to a motor. This motor is used to steer the steering wheel which is controlled by flaps.
Parts
Possible Challenges
- One of the challenges that we may face is to keep all the circuits and batteries dry. Since our project will be taking place on the water, we would have to find a way to encase all the circuits and batteries so that they won’t get wet. Also, another challenge would be how the boat will steer itself. Another challenge that we would face is calibrating the sensor so that it could not only detect objects but be able to move around them. We also decided to get flex tape in order fill and patch any holes we might have
Final Presentation
Automatic Object Detecting Boat
By: Abalus, Nicholas, and Xavier
Statement of Purpose:
The purpose of this project was to build a self-controlling boat. The boat would be able to detect and avoid objects in its surroundings. It also would not need manual control and be able to move on its own. This project is useful as although our project model was a small RC size boat this could be applied to larger boats. Just like how cars have begun to move to autonomous driving the same idea can be applied to boats. However, a difference between boats and cars is the type of obstacles they usually avoid. The main goal of our project was for the boat to maneuver around more sedimentary objects like possibly the shoreline or things floating in the water like buoys. This can be applied to the real world, however, from boats avoiding other boats of people in the water.
Features and Benefits
The main feature of the boat is the ability to avoid objects in its proximity. This is done by detecting nearby objects with the ultrasonic sensor then adjusting the boat according to drive away from the object. A benefit of this project is the real-world application for use by life-size boats. Although the code and design are not perfected enough to deal with all the inputs from real life the idea can be applied to life-size models.
Design (System overview/Design purposes)

For our design of the self-driving object detecting boat, we decided to go down the route of 3-D printing. By printing our model the ease of design when it came to size, shape, and other specifications of our boat were made relatively easy thanks to the properties that 3-D printing software provided. Our boat’s ability to steer and correct itself came from the Arduino board as well as an ultrasonic sensor. Ultrasonic Sensor HC-SR04 was used to measure the distance between the boat and the object obstructing it’ path. In order to generate the ultrasound, we set the Trigger Pin on a High State for 10 µs. This sends out 8 pulses that travel at the speed of sound and are received by the Echo Pin. The Echo Pin then outputs the time in microseconds that the sound wave traveled, the number obtained is double the number we need since the soundwave needs to travel forward and bounce backward. For example, if the object is 20 cm away from the sensor, and the speed of the sound is 0.034 cm/µs the sound wave will need to travel about 588 microseconds. But what you will get from the Echo pin will be double that number because the sound wave needs to travel forward and bounce backward. A program was written using the Arduino ide software that calculated this distance with the inputs from the ultrasonic sensor. To power our board we soldered a 6v battery to power the Arduino board. To make sure the battery wasn’t exposed to water or any other elements it was wrapped up in flex tape
Result
The ultrasonic sensor emits a high-frequency sound and any object that is within a certain distance would that sound bounce back to the sensor. Also, the sensor is connected to an arduino uno board so when we implement a code for the ultrasonic sensor that is able to detect objects. The code in particular is mostly used in cars so by altering the code so that it can be used on a boat, it would have a different result. Also, the board is connected to one of the motors and when the sensor detects an object in close proximity, it would send the information to the motor so that it may steer in another direction.
Problem and Challenges
Two major challenges we faced were making sure the components would be waterproof as well as 3d printing objects. Although we made an original design early for the boat on CAD we did not receive a 3d print back for our design. This hindered our ability to adjust the model to make sure the boat would safely be able to carry all the components necessary for our boat as well as being waterproof. Also, we were not able to implement our sensor, Arduino, and motors onto the boat making it difficult to make adjustments. Another challenge was creating a propeller that was compatible with our motor. As we did also create models in CAD, not being able to see the real print made it difficult to make the correct adjustments necessary to make sure the model worked. Finally making sure the ultrasonic sensor could detect objects but stay dry was a large challenge. Not being able to get a 3d print back made it hard to see how we were going to set up the sensor on the boat to keep it dry but still effective. For the future, we want to be able to print and modify a model for our boat so that it fits all of our components as well as is waterproof.
Video
https://drive.google.com/file/d/1U7Rqf0TxNsyQ_FtU73fV210wz42HC9Hl/view?usp=sharing
References
- "Autopilot". Tesla.Com, 2021, https://www.tesla.com/autopilot.