Name | NetID | Section |
Abhee Jani | abheej2 | ECE 110 |
Jia-Ye, Lai | jiayeyl2 | ECE 110 |
Statement of Purpose
Sortbot is a robot that will be created for the purpose of breaking down large piles of objects into organized sections specified by the user. SortBot will operate on wheels and chassis and have a clamp attached to the front capable of picking up and dropping off these objects. Through visual recognition, SortBot will be able to operate on a certain path designated for the category the object picked up belongs to. After each iteration of sorting, SortBot will be able to return to the user and pick up the next object without the need of intervention, allowing for there to be a seamless sorting process and ease of use for the user.
Background Research
Some inspirations for our project were autonomous bots that are used for cleaning and organizing around households in general. This includes products like the Roomba or the Shark Robotic Vacuum. In addition, we did some research on robotic parts used in factories for industrial usage that are able to discern from large varieties of objects to sort them accordingly. We wanted to give this kind of industrial technology to the typical household. This kind of usage was something that people should be able to find useful in their everyday lives. The practicality of the robot was vital to our vision of the project.
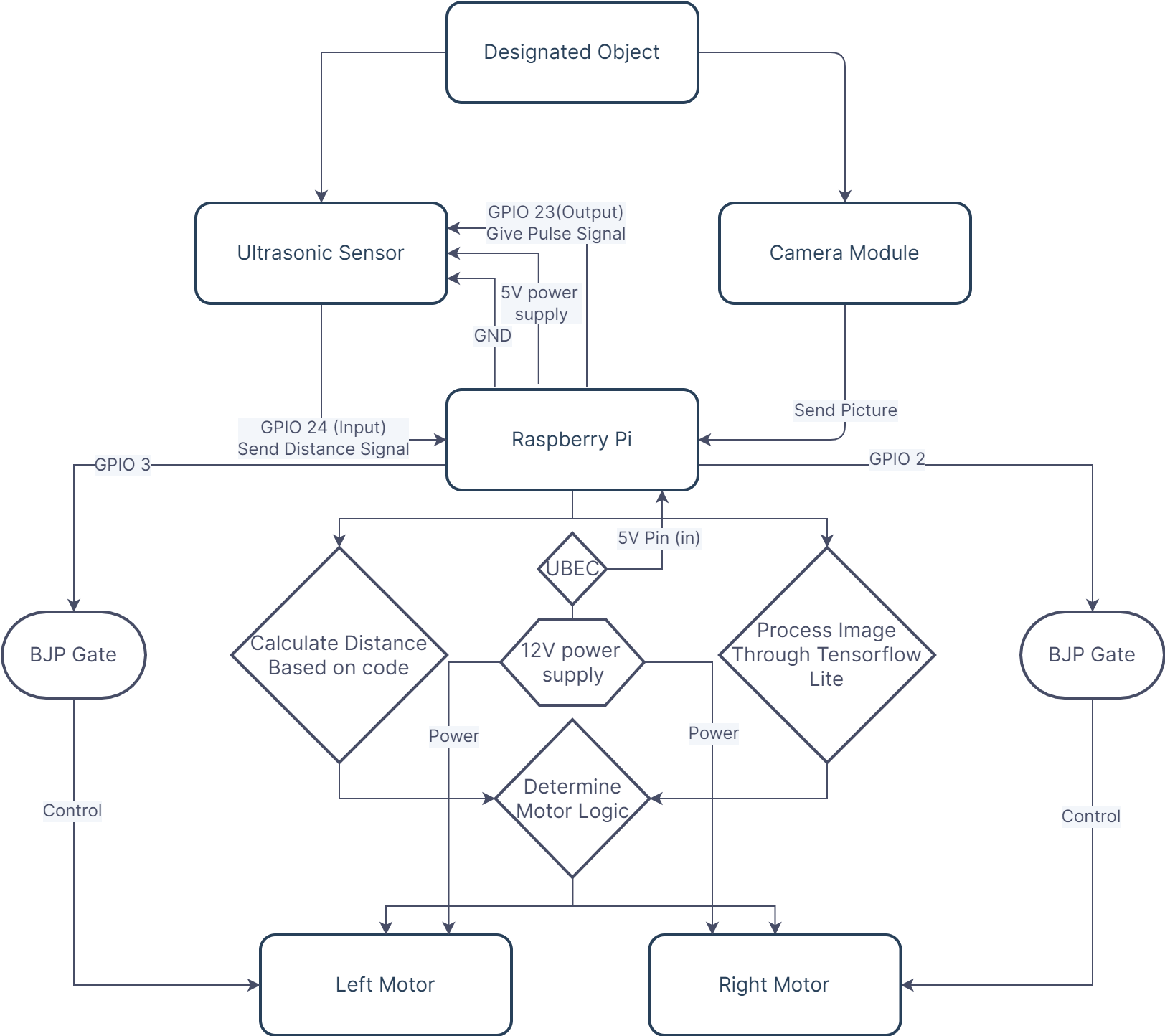
Block Diagram / Flow Chart
Initial Design

Revised Design
Thought Process

System Overview
Video Link: https://www.youtube.com/watch?v=M6XTartb0Kw
Final Paper Link: https://docs.google.com/document/d/1qyofohGkxUB_9HtA28nb6yfVxR4Zzu_mlwfTO0WPbWQ/edit?usp=sharing
Parts
Index | Item | quantity | Price | Part Link |
1 | Camera Module (913-2673) | 1 | 25 | https://www.digikey.com/en/products/detail/raspberry-pi/913-2673/6152811 |
2 | Raspberry Pi 3 Model B+ | 1 | 25 | Honor Lab Inventory |
3 | Tank Chassis | 1 | 25 | https://www.digikey.com/en/products/detail/dfrobot/ROB0153/10230090 |
4 | Mini-SerVo Motors*3 | 2 | 3.62 | https://www.digikey.com/en/products/detail/dfrobot/SER0006/7597224 |
5 | Robotic Arm | |||
6 | QUAD AA BATTERY HOLDER | 2 | 2.19*2 | ECE Supply Center |
7 | UBEC (1385) | 1 | 9.95 | |
8 | AA battery | 7 | 0.47*7 | ECE Supply Center |
9 | ADATA 16GB microSDHC UHS-1 Card | 1 | 4 | ECE Honor Lab Inventory |
Sum | Total Spending | N/A | 103.86 | N/A |
Possible Challenges
Programming a robot that can come back to a certain location can be challenging.
The processing ability of the Raspberry Pi might not be enough to provide an accurate result for image identification.
We have to figure out what mechanism to implement for capturing the designated object
References
https://www.zenflowchart.com/documents
https://www.makeuseof.com/tag/pi-go-x-ways-powering-raspberry-pi-portable-projects/