| Name | NetID | Section |
|---|---|---|
| Ethan Moore | edmoore3 | ECE 120 |
Statement of Purpose
The purpose of this project is to build a self-sustained aquatic robot that can semi-autonomously retrieve water samples. In the future, several of these in a network could collect a low resolution sample of a body of water, analyze samples for contaminants, and then systematically take higher and higher resolution samples in areas found to have abnormal concentrations until a pollution source is identified. This would enable the world to pro-actively take action against water pollution, whereas currently, we retroactively negate pollution by filtering which allows the pollution to continue.
Goals (in order of priority):
- Build the basic robot
- Create a manually controlled dry robot that has propulsion and steering
- Waterproof the robot and use in water
- Water sample collection actuator
- (This is my safe/realistic goal)
- Position Awareness
- Depth sensor
- GPS
- Compass
- Gyroscope
- (This is my first stretch goal)
- Self-sustained
- Solar panel
- Battery management system
- (Second stretch goal)
- Semi-Autonomous
- Add waypoint functionality
- Accelerometer
- Water current compensation
- Error handler
- (Third stretch goal)
- Extra sensory
- Temperature sensor
- Pressure sensor
- Camera
- (Fourth stretch goal)
(This is the absolute furthest I predict I can take this project this semester, though there is immeasurable amounts of future work)
Background Research
The motivation behind this project stems from my love for the environment. I frequently go dispersed camping all over America and have found a deep love for the peace and serenity found. I also have extensive background in competitive robotics. Combining these two passions, I find myself wanting to use robots to save the environment. The need arises from the fact that many of our water pollution “solutions” are retroactive. This means that we acknowledge the pollution, and then do our best to put a band-aid on it by cleaning this water. This is only a temporary solution and is not sustainable in the long run. Instead, we must stymie the pollution at its source. This puts us on the offensive as we will be proactive about finding sources of contamination and eliminating them.
In my research, most UAV’s (underwater aquatic vehicles) are used to sample water in order to monitor the ecosystem. I would like to apply them to be used against pollution. Additionally, most UAV’s are not used in a distributed network (which is the ultimate intention of this project in the far future). Another unique factor is that this UAV is intended to resurface and solar charge making it self sustaining. This project is relatively unique as it would be one of the few 3D printed UAV’s with scientific/environmental application rather than for an RC hobby.
Block Diagram / Flow Chart
Provide a simple block diagram of your hardware design. A block diagram is a schematic graphic that shows the interactions between different components in a hardware or software system. If appropriate, please also include a flow chart showing the steps your design needs to go through to function. The online program draw.io is a great tool to create polished block diagrams and flow charts. Likewise Microsoft's visio is also a great program to create block diagrams and flow charts.
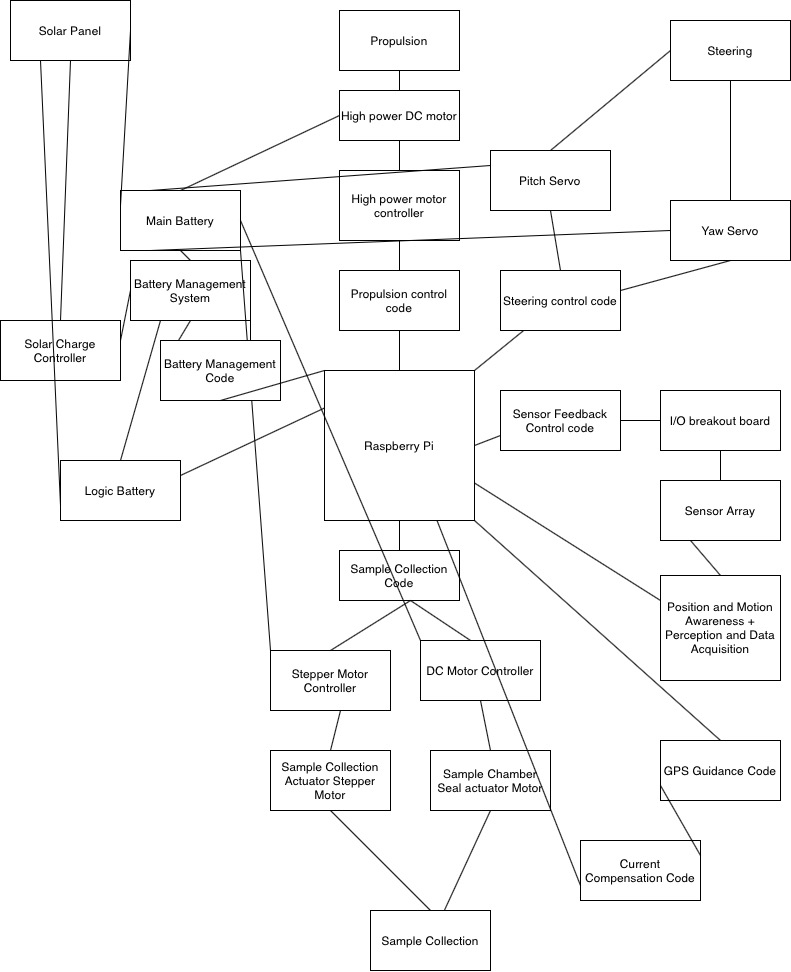
System Overview
The main controller for the robot will be the raspberry pi. This will be connected to a radio transmitter/receiver that will communicate packets of information. It could transmit its current location, battery status, recorded information, camera feed, error/feedback log, and mission progress. The raspberry pi will then process the data it has received (from the users computer) in order to make its decisions. If its mission is unchanged, it will continue. When the raspberry pi has a mission, it will process it into a variety of controls. The first code would process the current position of the robot (coordinates, compass heading, yaw, pitch and roll). The next code would process the desired location. The waypoint code would calculate the heading needed to move toward the desired location. Then the motion control code will decipher the heading into outputs that will tell the robot how it needs to move. The motion control code will then send the appropriate outputs to all the motors, and listen for feedback. This process will repeat until the desired location is achieved. Then the water sample collection code will run to acquire the water sample, and the sensor array’s feedback will be recorded as well as the time. All the while, the battery management code will be running to monitor the battery status. When needed, the robot will be told to resurface and charge. Also running the whole time (including during charging), the current compensation code will be running to ensure that the robot stays on track towards its waypoint and not away from it. It should be noted that the robot will be able to many samples.
In future work, many of these robots will be used in a distributed network in order to obtain low resolution datasets over a whole body of water. Once this data set is acquired, it can be analyzed to identify regions in which contamination is higher. The robot network will then focus solely on this region in order to obtain an even higher resolution image, and repeat this systematically until a pollution source is identified. Engineers could then solve the unique source problem. On top of this, as more and more data sets are acquired, an AI could be created and trained that could expedite and perfect the identification of point sources.
Parts
| Name | Use | Qty | Price |
| Raspberry Pi 4 | main control | 1 | ? |
| Higher power DC motor controller | Control propulsion motor | 1 | ? |
| High Speed Brushless DC motor | Propulsion | 1 | ? |
| Brushless DC motor | Sample chamber seal actuation | 1 | ? |
| Servo | Steering | 2 | ? |
| Stepper motor | Sample collection actuation | 1 | ? |
| Limit switch | Sample chamber seal open/close sense | 2 | ? |
| Gaskets | Waterproofing | N/A | ? |
| Main battery | Power propulsion, steering, and sample collection | 1 | ? |
| Logic battery | Power raspberry pi, sensors, and BMS | 1 | ? |
| 3D printer filament roll | Use on my own 3D printer | 1 | ? |
| GPS | Position awareness | 1 | ? |
| Compass | Position awareness | 1 | ? |
| Gyroscope | Position awareness | 1 | ? |
| Depth sensor | Position awareness | 1 | ? |
| Solar panel | Recharging | 1 | ? |
| BMS | Managing batteries and recharging | 1 | ? |
| accellerometer | Motion awareness | 1 | ? |
| Temperature sensor | Data acquisition | 1 | ? |
| Pressure sensor | Data acquisition | 1 | ? |
| Camera | Perception | 1 | ? |
| Wire | Building | N/A | ? |
| MOSFET | Used with high power DC brushless motor | 1 | ? |
| Solder | Building | N/A | ? |
| Solar charge controller | Controlling solar charging | 1 | ? |
| Screws | Building | N/A | ? |
Nuts Radio Reciever/Transmitter | Building Comma | N/A 1 | ? ? |
| Miscellaneous building supplies | Building | N/A | ? |
| Miscellaneous electronic supplies | BUilding | N/A | ? |
Possible Challenges
- Water proofing
- High power motor setup for propulsion (cant just use a L298 controller)
- Using many sensors with one raspberry pi - i/o breakout board?
- raspberry pi computing power limitation
- Turbulent disturbance from propellers influencing sample collection
- As samples are collected, robot will likely sink
- Current compensation algorythm
- GPS location/waypoints
- Cost? (I hope i am allowed to provide my own additional funding)
Project Deliverables:
Report: https://docs.google.com/document/d/1YA3Y5bziSjm_p9Ytp65fnSyVI69TIybT9jPpfC8p_cI/edit?usp=sharing
Video:
References
Coml.org. 2021. Technology: Niskin Bottles: Collecting Organisms, "Investigating Marine Life", Census of Marine Life. [online] Available at: <http://www.coml.org/edu/tech/collect/niskin.htm> [Accessed 20 February 2021].
Nasir, S., 2021. Introduction to L298 - The Engineering Projects. [online] The Engineering Projects. Available at: <https://www.theengineeringprojects.com/2017/07/introduction-to-l298.html> [Accessed 20 February 2021].
Oceanexplorer.noaa.gov. 2021. What does “CTD” stand for? : Ocean Exploration Facts: NOAA Office of Ocean Exploration and Research. [online] Available at: <https://oceanexplorer.noaa.gov/facts/ctd.html> [Accessed 20 February 2021].
You can use citethisforme.com's IEEE citation generator to painlessly generate your references in this style.