| Name | NetID | Section |
|---|---|---|
| Colby S. | cstaral2 | ECE 120 |
| Daniel B. | dbaker5 | ECE 120 |
| Advait R. | advaitr3 | ECE 120 |
Statement of Purpose
The concept of Thor's hammer is pretty entertaining; an object that can only work for, and in this case, can only be lifted by one person, or in some cases, one set of people with similar qualities. This criteria is actually far more relevant to electronics, sensors, and computing technology than may immediately be apparent. Think of biometric developments like to fingerprint, iris, and facial scanners. All are examples of how individual recognition is useful in the world of computers. Despite Thor's hammer being a fictional object with impossible properties, many have tried to find ways to explain and replicate the unique mechanism that makes the hammer only work for Thor. We sought out with this project because we thought it would be a unique and fun way to explore and display the use of sensors and electromagnets. Rather than by biometrics, our hammer function's will be primarily dependent on a force sensor, which may better explain the Thor's hammer problem, and also provide a more fun in challenge in the process of lifting it. Initially, the hammer will respond to any given force, and the relay deactivate the electromagnet so it can be picked up. However, after this, the hammer will record the previous force and require another input of equal or greater force to allow the relay to deactivate the magnet so it can be picked up again.
Background Research
Our initial decision to explore this project had us questioning what would be the best mechanism to represent the way in which Thor's hammer can only be lifted by Thor. Other designers who had taken on the challenge seemed to lean towards a biometric approach, with fingerprint scanners being the most common component used. However we thought it might be more accurate and interesting to see if we could make it so only the strongest person could hold the hammer. After all, Thor has the strength of a god so maybe the hammer works based on strength. Moving forward with this idea, we knew that our hammer wouldn't automatically know what degree of force is the strongest, so we decided to have it record and increment the amount of grip force required to lift it. After deciding on this principal component, we researched what parts would be required to execute this function. We figured that the signal from a force sensor at the top of the hammer would be directed to an Arduino pro mini, which would then connect to a relay that controls the electromagnet that allows the hammer to stick to metal or to be lifted.
Block Diagram / Flow Chart
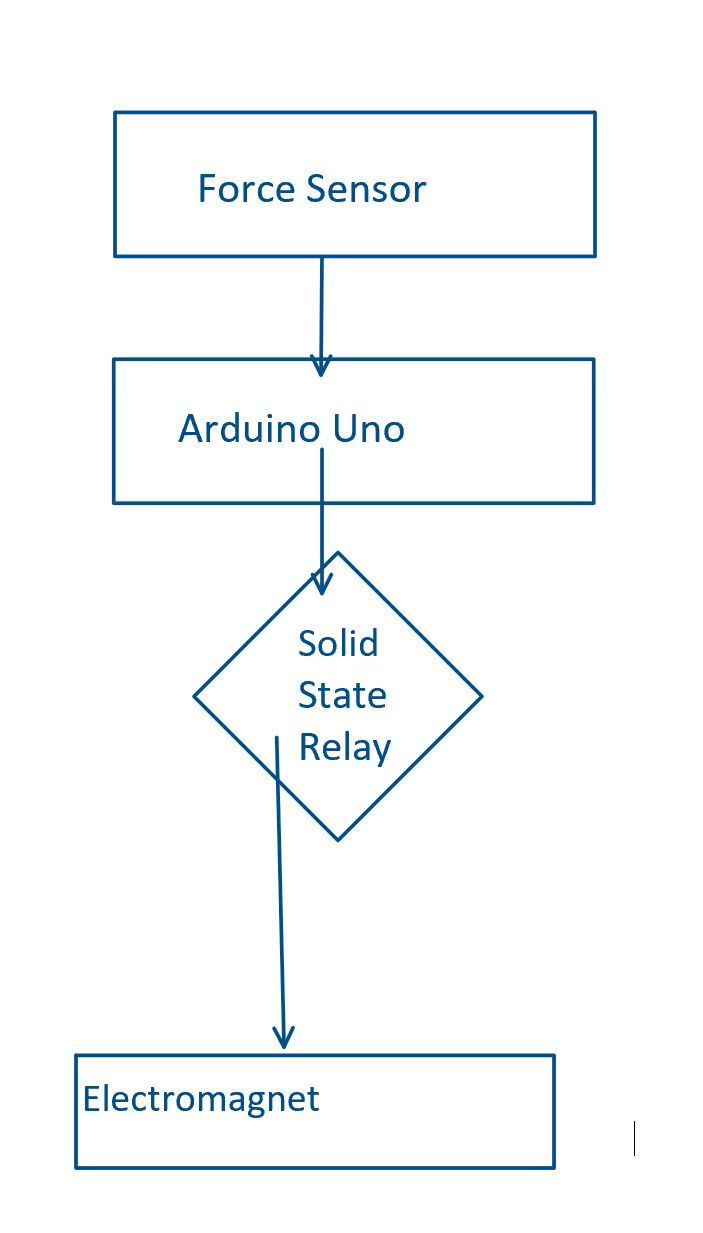
System Overview
Force Sensor: Detects the amount of pressure provided by the thumb. The sensor will store the initial force applied, and increment this variable with each increased magnitude of force applied.
Arduino Uno: The brain of the project; stores the data from the force sensor, manipulates the data, and then decides whether the following circuit needs to be completed by controlling the voltage.
Solid-State Relay: Gets the voltage from the Arduino and then depending on the voltage sends a message/signal to the microwave transformer to either turn on/turn off the magnet.
Parts
- Force Sensor ($36.10)
- Arduino Uno ($19) *Ask if lab already has one to borrow)
- 3.7 V Lithium-ion battery ($6)
- Battery holders ($3)
- 4 12V batteries ($40)
- SOLID-STATE RELAY, 60V 400MA, 6-PIN DIP ($3)
- Electromagnet (borrowing from Quinn)
Possible Challenges
- We will need to learn how to program the software needed record the initial force applied to the sensor, store it, and check whether the next force applied is greater than the earlier force. We will then have to turn off the current in the electromagnet if the new force is greater, and store that force as the new greatest force.
- It will be hard to het the necesary materials to make the Thor Hammer seem somewhat realistic. We will need to create a large metal hammer, as well as a sturdy handle that can widthstand people trying to pull it off the ground.
References
Hagan, E., 2016. Only You Can Lift This DIY Hammer Of Thor. Popular Science.
Adafruit Learning System. 2021. Force Sensitive Resistor (FSR).
Thor's Hammers in Real Life! (Hacksmith Vault #1) - YouTube
Thor's Electromagnetic Hammer is IMPOSSIBLE TO LIFT - Bing video
HOW TO MAKE Thor's Hammer/Magnetic Mjolnir - YouTube
Attachments:
{kind=link}
Comments:
|
You guys mention a microwave transformer in your project proposal, but not in your parts list. I'm also concerned that you're spending 52$ on 12-V batteries. Can you provide a link to the specific parts? I might also suggest adding a manual override/reset, since you'd want to be able to reset the hammer's force requirements incase someone stronger than either of you lifts the hammer at any point in time. Lastly, by force do you mean grip force (i.e. how hard you squeeze the handle) or pulling force (how hard the handle is being pulled)? |
|
I will just echo Showmik's comments and I also don't see an electromagnet on the list but definitely be careful when using strong ones. In that vain, it may be safer to focus on a hammer that is activated by highest grip strength as then people don't whack themselves in the face when attempting to pull. I would love to see a bit more references to address the various parts of this project. It's possible that the ones you have listed may cover the necessary knowledge but I don't have enough technical information in the diagram or overview to know that. A link to the references would be nice too. Add those things and I can approve the project proposal! |
|
Bycul, Dawid Chatterjee, Shomik We've removed the transformer as we have an electromagnet that we'll be provided with. In terms of the cost of the batteries, we have found some 12v batteries that are slightly cheaper. We could probably find and use lower voltage batteries that are cheaper, but we're unsure how much that will affect functionality. We we're also thinking we may need to add a reset, so we'll be adding that to the possible changes section. We also have added some more of the resources we used to the references section. Finally, by grip force we do mean how hard you squeeze the handle, rather than pulling force. The grip force will be measured by a force sensor near the top of the handle. |
|
I'm not sure why I missed your explanation in the proposal that you are actually measuring grip force. I like the changes, you guys are approved as group #8 |