| Name | NetID | Section |
|---|---|---|
| Michael Sutanto | sutanto4 | ECE 110 A3 |
| John Truong | jtruon9 | ECE120 A2 |
| Xinyu Wu | xinyuwu4 | ECE120 A2 |
| Yu Li | yuli9 | ECE120 A1 |
| Soham Manjrekar | sohammm2 |
Statement of Purpose
Doing this project allows us to go thrgouht the complete procedure of building a robotic device. Building the hexapod robot requires us to design both hardware and software component. We will learn how to use mirocontroller to manipulate the robot and how to assembly it efficiently. It would be profoundly meaningful for our future learning.
Background Research
Compared to humans, robotics are more popular in some of today’s workforce. Robotics are tireless, efficient, and secure. Among them, the hexapod robot is one of the most employed robots because of its precision in automated positioning and alignments of parts. Part of our background research includes the structure of the hexapod robot. By applying bionics (mimic the structure of limbs in insects), the hexapod is able to keep a nice equilibrium while moving, which allows it to have better precision.[1]
This project is a great opportunity to enhance our ability to apply software and hardware in building a machine. The remote-controlled walking machine introduces digital control, robotic programming, and robotic mechanism. Our works will involve signal processing, gait programming, frame design, movements, and so on. It’s an integrated process to work on, and a chance to improve our ECE knowledge from the experience on this project.
Block Diagram / Flow Chart
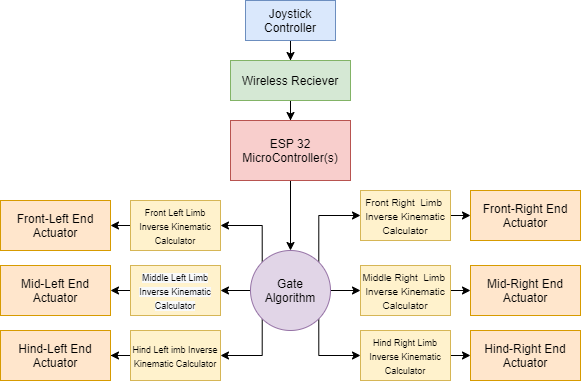
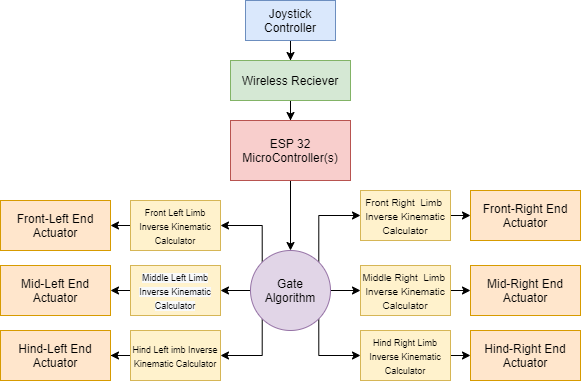
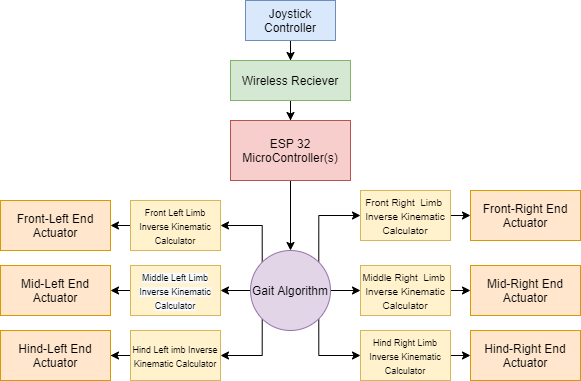
BLOCK DIAGRAM PROJECT FLOWCHART
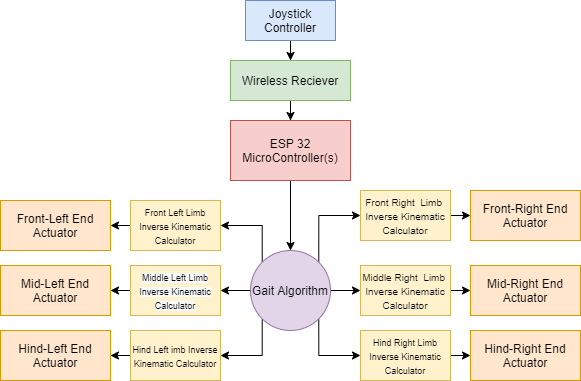

System Overview
Block Name | Purpose |
|---|---|
| Joystick Controller | Main input device |
| Wireless Receiver | Wirelessly receives signals from the joystick |
| ESP 32 Microcontroller | Processes information, handles Motor control, handles gait algorithm |
| Gait Algorithm | An algorithm that translates input signals into limb target coordinates |
| Inverse Kinematic Calculators | Algorithms individually tailored for each limb to translate coordinates to motor movement |
| End actuators | The servo motors controlling the limbs |
Parts
Provide a list of parts that you may need for your project. You should include details such as the quantity, model number, purpose, vendor, and price (excluding taxes and shipping) for each part. This list may change as you work on your project.
| Model No. | Quantity | Price | Vendor | Purpose | |
|---|---|---|---|---|---|
| 1 | ESP32 Dual-Core Development Board | 2 | 6.04 USD/unit | 'arduinouno' store in Tokopedia | The two dual-core boards would be used for: 1)Servo Synchronization 2)Implementing Inverse Kinematics Algorithm 3)Receiving Signal Input and Processing to desired coordinates using gate algorithm |
| 2 | SG-90 TowerPro MicroServo | 20 | 0.81 USD/unit | 'Happy Indonesia' vendor in Tokopedia | 3 Micro Servos will be used in each of the six limbs to facilitate robot movement. |
| 3 | Wireless PS2 Controller and Receiver | 1 | 5 USD/Unit | 'Athena Game Shop' vendor in Tokopedia | Chose to use PS2 Controller because the receiver could easily be connected to ESP using Jumper Cables |
| 4 | Jumper Cables (Male/Male, Female/Female, Male/Female) | +-80 pcs | 0.80 USD/20PCS | 'ARDUSHOP-ID' vendor in Tokopedia | For connecting parts of the robot |
| 5 | PLA 3D Printed Parts | +- 150 gr | 0.2 USD/gram | Fomu 3D Printing Solutions | 3D Printed Parts that require greater accuracy |
| 6 | PLA+ 3D Printer Filament | 1 Roll | 13 USD/roll | 'voltapro' vendor in Tokopedia | 3D Printed parts that could be printed individually |
Possible Challenges
Some challenges that may arise are the difference in time zones. A majority of the team members are international, so figuring out a time to meet can pose an issue. Another challenge may be the assembly of the robot or at least a physical one. Because team members are abroad, creating something physical may not be feasible; if it should happen, only one person would have to put in a lot more time and effort into constructing the robot.
Final Result:
References
[1]C. Urrea, L. Valenzuela and J. Kern, "Design, Simulation, and Control of a Hexapod Robot in Simscape Multibody", Applications from Engineering with MATLAB Concepts, 2016. Available: 10.5772/63388 [Accessed 19 February 2021].
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}