| Akhil Kodumuri | Eric Xu |
|---|---|
| akhilvk2 | ericxu2 |
- Introduction:
- Statement of Purpose
The goal of this project is to create a robotic arm that will mimic the movements of a users arm. There will be a sleeve/glove over the users arm with sensors that will guide the robotic arm. This is intended for people who want to do dangerous tasks like handling chemicals or handling sick patients. This can be used in manufacturing as well. This project will be useful because it can be used to advance sensor and robotic technology. This project is useful because it can help people to do dangerous or precise tasks that they would be otherwise discouraged to do because of the potential risks or harm to the user or the recipient. - Background Research
This project was mentioned during one of the meetings, and a CA mentioned how that a similar project was done in a past honors lab section. The idea was developed while researching various robotic projects. A lot of the results we found were all used to accomplish tasks and make people's lives easier. Our project is similar because it is designed to makes peoples lives easier. However, our robot will be mimicking a persons movement, while other projects just perform repeated tasks.
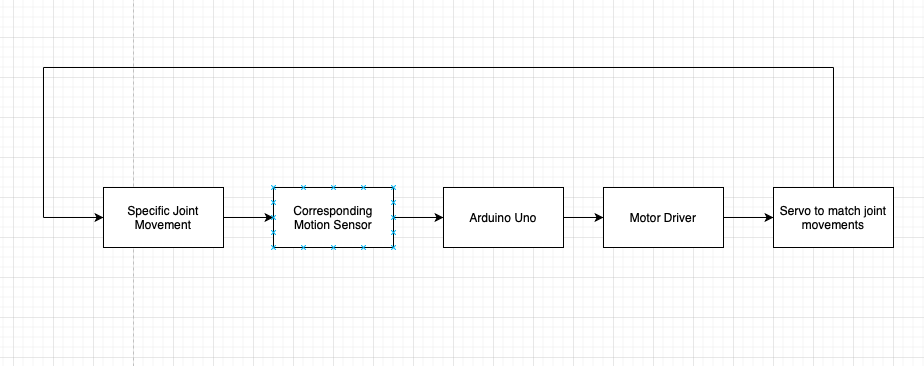
2. Design Details- Block Diagram / Flow Chart
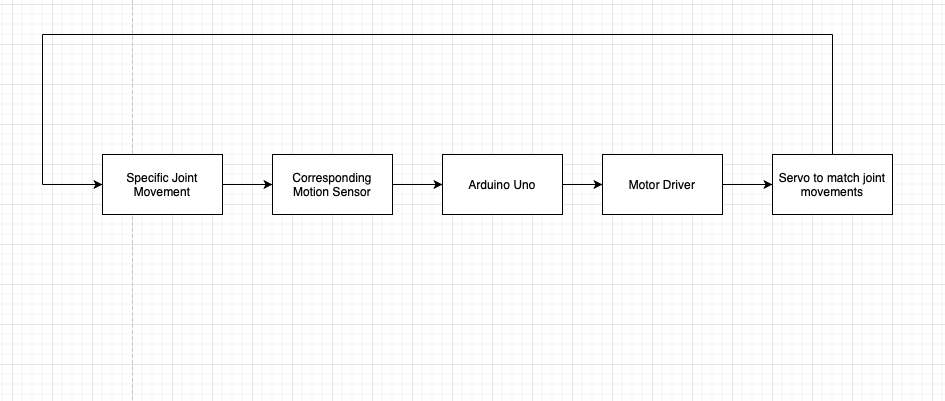
- System Overview
- Joint on the users arm moves
- Corresponding Joint Sensor moves
- Arduino controls motor driver
- motor driver moves joint
- Block Diagram / Flow Chart
- Statement of Purpose
- Parts
- Aruduino Uno
- Servo
- Lidar Sensors
- Mechanical Parts
3. Possible
a. Making sure the sensors activate when the user's arm moves. Coding and assembling the whole project.
4. https://www.7pcb.com/blog/assembly-by-hand-vs-machine.php
Attachments:
{kind=link}
Comments:
|
Please do more background research on teleoperation robots. This project would be highly challenging with lidar sensors since this would require generating a 3D model with the output point clouds, recognizing the user's hand motion, mapping user's hand to the software model, and generate the configuration for the servo motors to move to. Each stage could be single semester research. I would suggest that you collaborate with the other project "An Extra Set of Hand" since what you are doing is very similar to what Brennan is trying to make. Please read my comments for his project proposal and update your project proposal or team up with Brennan. |
|
Agreeing with Johnny; this is very similar to another project this semester, so I would recommend collaborating with him. You're also both single/solo projects (!!!) so we would highly recommend working together instead of doing the exact same thing twice. In addition, you need a LOT more research. This proposal is extremely bare-bones and does not show sufficient background research. You need to significantly revise this proposal to demonstrate sufficient research, design, planning, and forethought. Also, as Johnny said, including a LIDAR is incredibly out-of-scope of this project and would require an absurd amount of processing and prior knowledge about point cloud processing and SLAM to be of any use. It is not appropriate for this project. |
|
As mentioned, it's a lot for a solo project. Definitely too much. If you want to stick with this, I may suggest instead of 'mirroring' movement just take input from a joystick to move. Once you have that part established, feel free to add another axis of rotation + joystick or an element like a grabbing hand. (Somewhat similar to this <An Extra Set of Hands> project. Look into collaborating if possible and preferable) |
|
Your proposal is not yet approved. Please contact one of the course staff or make the appropriate revisions to your proposal by tonight. |