The Team: Prannav Gupta (prannav2), Vatsin Shah (vns2), Chirag Nanda (cnanda2) (all ECE 110)
Session: 6-7pm Tuesdays
Project Proposal
Introduction
Statement of purpose
The purpose of this project is to create a real-time tracing robot that prints an image being drawn simultaneously.
Design details
Using a resistive touch overaly, a user will be able to draw an image that will be traced on a separate surface by a robot in real time. The robot the will be controlled by a servo motor and two stepper motors, moving along a fixed x-y plane. The robot will be controlled with either a raspberry pi or an arduino.
Possible challenges
The main challenge we will face is getting the robot to trace emulate the drawing fast enough so that a user will not need a screen to view the image he/she is drawing
Block Diagram

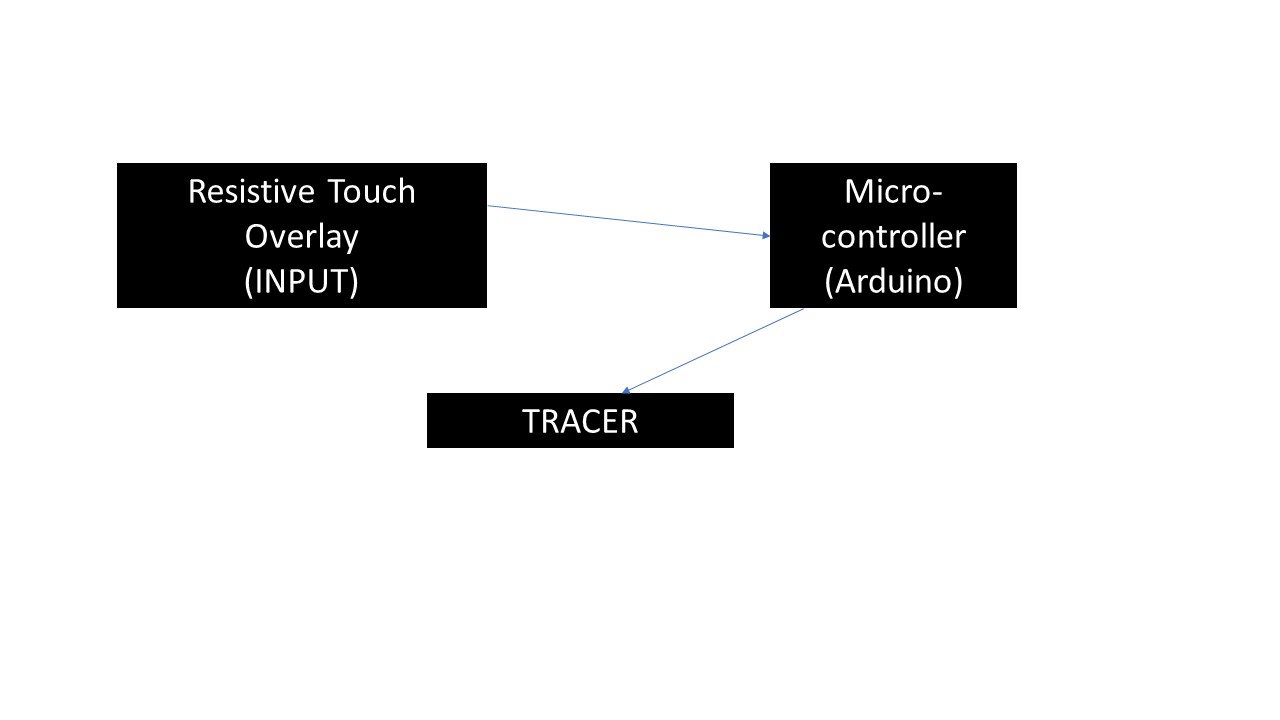
System Overview
This system takes input from a Resistive Touch Overlay and sends x and y coordinates to the RaspberryPi which controls the stepper motors and a micro servo. Each stepper motor is controlled by a motor driver circuit (pre-built). The stepper motors would move a pen on the x and y axes and the micro servo pushes the pen onto the paper to maintain pressure. The approximate size of the entire design depends on the size of the touch overlay.
Parts Needed
- Arduino UNO/RaspberryPi
- 2 Stepper Motors
- Micro Servo
- Motor Drivers for stepper motors
- Resistive touch Overlay
- Chassis (3D printed)
- Marker
- Power Adapter
{kind=link}