Chun-Kai Yao / ckyao2-ECE110 , Kevin Tung/kevintt2-ECE110, Gahou Hu/jiahaoh2-ECE110/120
Introduction
Purpose
We’ve realized that when there are more than two lanes on the streets, cars that are on the lane that are far away from the pedestrian usually has a hard time noticing the pedestrian. This occurs due to a blind spot created by the car in front. Therefore, to help pedestrians cross streets safely, we hope to create a type of warning sign that warns the pedestrian when a car is passing by the street.
Background Research
“Statistics from the National Highway Traffic Safety Administration show that nearly 840,000 blind spot accidents occur each year in the United States resulting in 300 fatalities. This is partly due to individuals not adjusting their mirrors properly, or not properly checking their blind spots before changing lanes.” (https://www.fortheinjured.com/blog/blind-spot-accident/)
With 840,000 blind spot accidents each year and 300 of them resulting in death, we believe there is a simple solution to this problem by setting up a warning sign for pedestrian.
Design
Block diagram
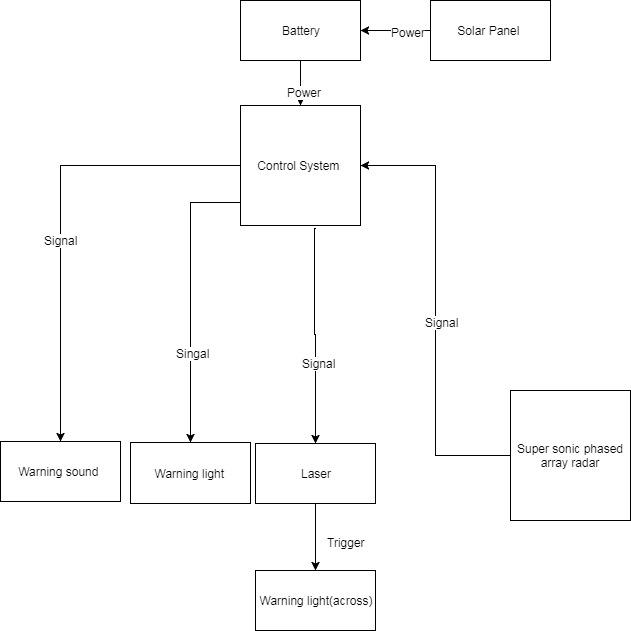
System overview
The control system has a radar to detect oncoming vehicles, and then return as light or even sound to pedestrians and bikers. The powered system is installed on one edge of the street with radar, light, solar panel, and sound. The other side of street is equipped with a concave lens, which expands the parallel laser from the main port, thus flashes to alert the cross.
Parts
18 Supersonic Radars ranging from 80m to 20m
4 laser beam generators
1 warning light
1 concave lens and mirror
4 Bluetooth 4.0 beacons
1 alerting sound speaker
1 Arduino
1 Solar panel (Power needs to be examined and calculated)
1 Battery (Power needs to be examined and calculated)
Testing Materials (Model Vehicles, Signal receiver, etc.)
Challenges
Initially, we wanted to make the system with laser radars and cathode ray, but after discussed with 110 Lab TAs, we found it was hard and time-consuming to build. Then we examined the rotating radar, but found the resolution could not satisfy our design. After carefully re-constructed the overview, we narrowed to current plan.