The Construction of Fly-By-Wire Platform with Arduino
Introduction
Fly-by-wire system is a newly developed, widely applied technology on modern aircraft. In such system, electrical systems, instead of hydraulic systems, are in charge of controlling the plane. Apart from the intensively applied electronic systems, fly-by-wire system allows computer to intervene human controls to a greater extent. In practical applications nowadays, fly-by-wire system always contain pilots' operation within the flying envelop if the airplane is in a normal state.
Though it is still controversial about whether the machine should ever intervene human decisions, fly-by-wire system indeed give us another choice of controlling the plane. In this project, I'm going to make a functional fly-by-wire platform with Arduino that could communicate with each other in terms of manual input and machine decisions and finally make determination with the output. Yet, in this project, no particular logics about the flight should be included; I'm only considering building a platform which we could freely edit according to our decision later.
Components needed
2 Arduino
Xbee
LEDs (for output simulation)
4 servos
wires
Goals to achieve
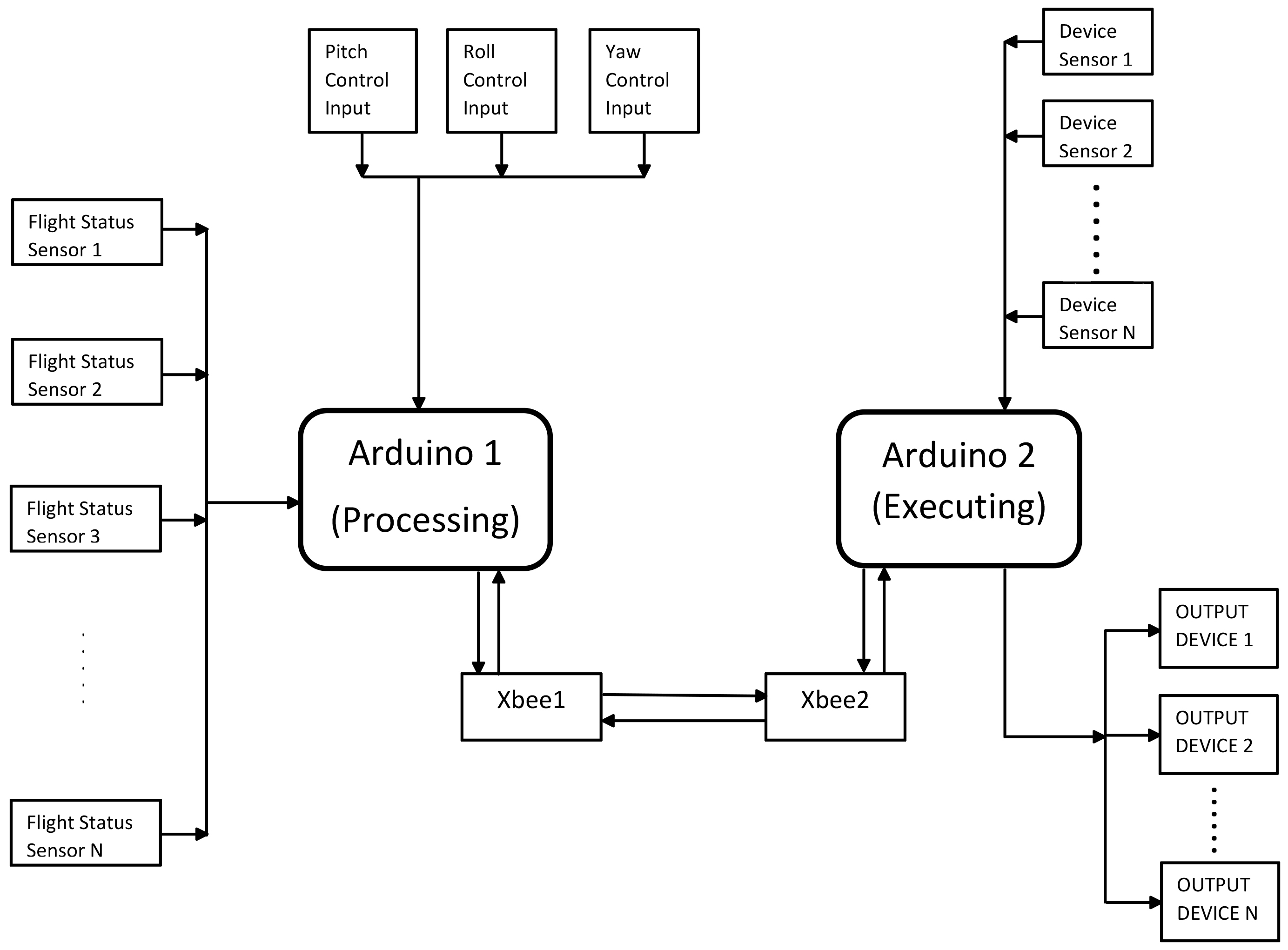
1. Construct a system in which two Arduino could mutually transmit data via XBee
2. One of the Arduino takes inputs, does logical computations and makes decisions after which transmits the decision to the other Arduino remotely
3. The other Arduino receives data from the first one as an input while execute the decision via output devices.
4. After the aboves are successfully accomplished, additional sensors will be added to detect the status of output devices and transmit the data back to the first Arduino for interpretation.
5. Decision will be made according to current flight status input, current output decisions and the feedback from the device status sensor.
General Block Diagram for Implementation
Reference and useful links
- Auto recover system based on FBW platform in F16 fighters that has successfully saved lives.
https://www.youtube.com/watch?v=WkZGL7RQBVw
(Automatic Ground Collision Avoidance System GCAS)
2. A typical comparison between Mechanical Flight Controls
and Fly-by-Wire.
