Designers: Ximin Lin, Yue Yuan, Zeran Zhu
Description:
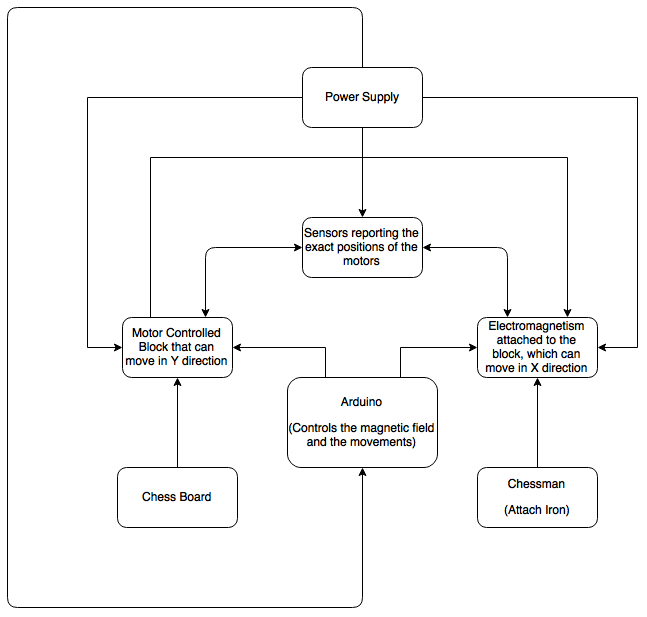
- The chess board will respond to a command given by computer and move a given piece of chess to a designated position by the order.
- The input will be transmitted through a USB cable to Arduino, and then Arduino will process the signal, finally deciding which piece, which direction and how many grids to move.
- Finally, if time allow us to, we will upgrade this chess board to be able to detect the movement of one side (black for example), and use a computer chess algorithm to automatically respond to that movement. In other words, this chess board will enable you to play human-machine chess games in reality.
- The grid on the chess board should be wide enough (no less than twice the diameter of the pieces), so that the moved piece can easily get through.
- The movement will be based on either fixed magnetism moving up and down to lock on the piece or alternating electro-magnetism.
High Level Block Diagram:

Weekly Journal
Week 5
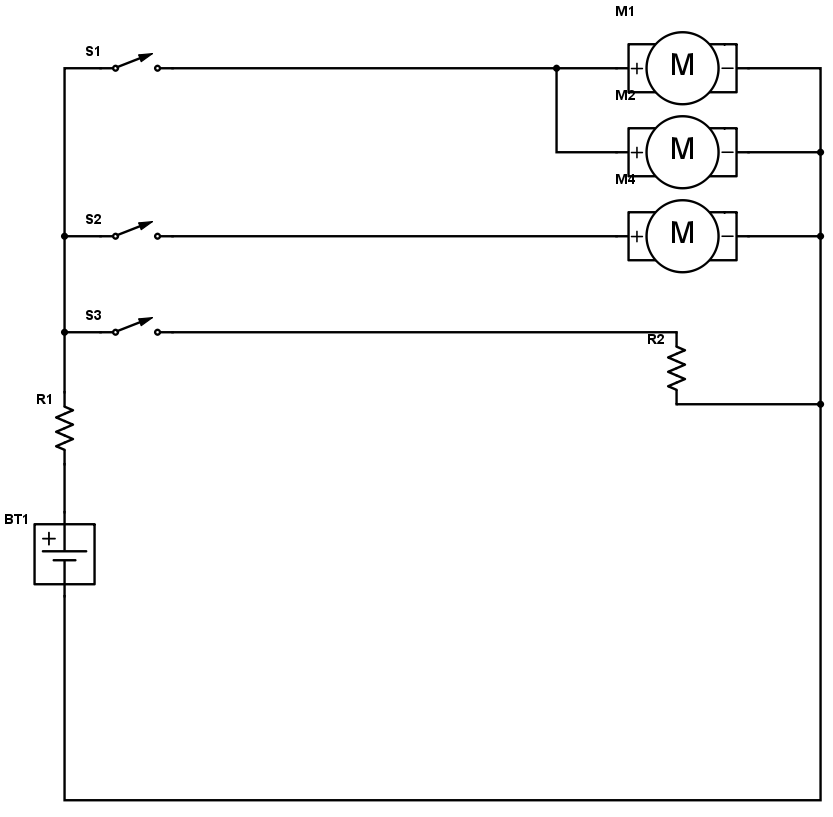
We try to figure out the circuits of our detect-control system. We are not sure the exact modules we need ,because we cannot see the size and quantity of these modules.
Week 6
Continued on ordering parts
Week 7
resistor of electromagnet (Small): 60ohms
so with a 5v voltage source, the current will be 0.08A
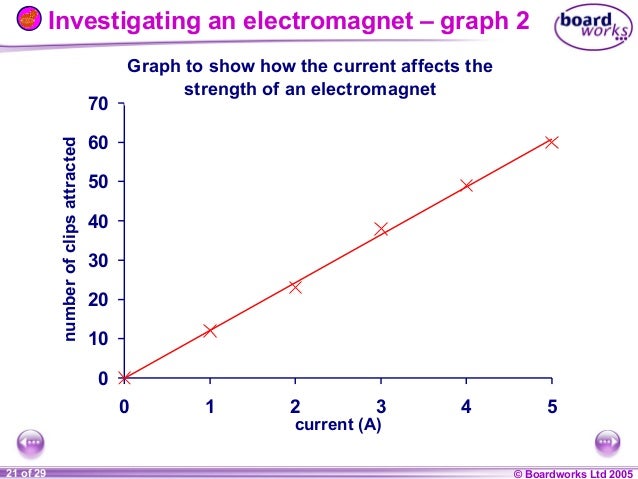
(image from http://www.slideshare.net/cartlidge/8-j-magnets-electromagnets-boardworks-30798150)
Since most of parts has not arrived yet, we are designing the control system for motors now and keeping doing research on electromagnets.
We figured out how to precisely control the position of the motors using the "digitalWrite" and "delay" functions in Arduino, and we will keep looking for better alternative ways of implementing the control of motors
Week 8
We are designing the circuit for the motor so that we can control the direction of the motor. We have completed the code for the motor control. While we are working on H-bridge to invert the current direction through the motor.
Week 9
We are still working on implementing the motor with H-bridge so that it can turn in two directions. We are getting close to the programming part. We are currently using DC motor as prototype and if we still have time after that, we will try to use stepper motor to make sure the motor move the precise distance we program it to.
Week 10
We are making progress to have two motors, one controlling x movement and one controlling y movement, move at the same time so that the chess pieces when moving can avoid other chess pieces that are in the way. We are increasing the precision of movement by adding hall effect sensor.
Week 11
We are working on the circuit of hall effect sensors and writing the code of the feedback system. We are also testing the relationship of the power and the surface temperature of the electromagnet
Week 12
We characterize the hall effect sensor and build the hall effect sensor circuit. We use the hall effect sensor and the Arduino to count the cycles that the motor rotates in order to control the movement of the motors.
Week 13
We finish the circuit of hall effect sensor and put the hall effect sensors close to the wheels such that the hall effect sensors could count the cycles of the wheels and does not disturb the rotation of the wheels.
{kind=link}