In this assignment you will be implementing the A* search algorithm for solving GridSearch. You can safely reuse some of the code you wrote for MP3 (e.g. A* search) to solve this problem. You will see both the power of A* as an algorithm that applies to arbitrary discrete state spaces, and the power of heuristics to speed up search.
To get started on this assignment, download the template code. The template contains the following files and directories:
search.py. You will edit and submit this - your
implementation of A* goes here.
state.py. You will edit and submit this - your
implementation of each problem’s State goes here.
utils.py. Some utilities we provide for computing a
minimum spanning tree.
maze.py. Some utilities for reading and working with
grid mazes.
main.py. You will run this file to test your
code.
data/. Files containing example mazes to
solve
Please ONLY submit search.py and state.py
(NOTE that search.py should be unchanged from
MP3).
For each of the remaining parts of the assignment you will find TODOs
in search.py and state.py where you need to
write your own code. For example, for part V you will find TODOs marked
# TODO(V). We’ve provided many comments and instructions in
the code under those TODOs.
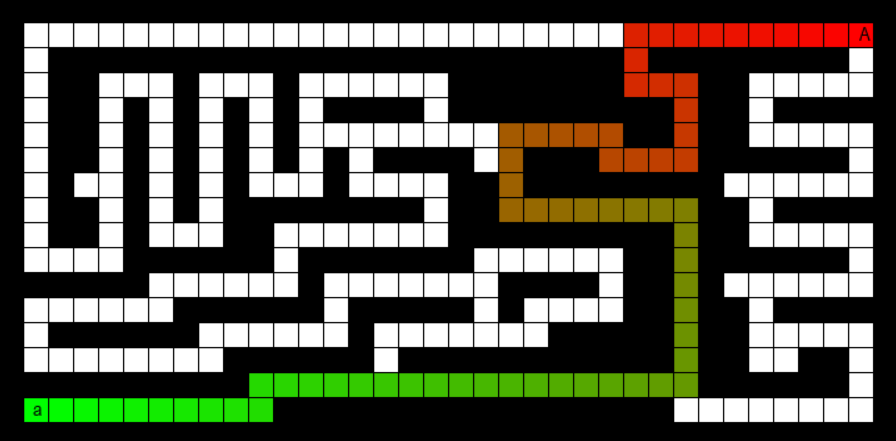
Run the following to see mazes and navigate them yourself with the arrow keys:
python3 main.py --problem_type=GridSingle --human --maze_file=[path_to_maze_file in data/grid_single] --altcolor optionNow you will need to implement the SingleGoalGridState
class. If you would like to see how the maze is built navigate to
maze.py, but otherwise we’ve provided you everything you
need and instructions in state.py where you have 2
“TODO(III)” in search.py to complete (copy previous code)
and 4 “TODO(III)” in state.py (including in AbstractState).
The heuristic we use for grid search is the manhattan distance from the
current location to the goal. You may assume all actions cost 1 (meaning
the dist_from_start for every neighbor should be 1 more than its
parent), and this remains true for the rest of this assignment.
You can test your code with:
python3 main.py --problem_type=GridSingle --use_heuristic --maze_file=[path_to_maze_file in data/grid_single] If you would like to also visualize the resulting solution in PyGame
add the --show_maze_vis flag.
Make sure to pass in the use_heuristic flag if you wish to test your heuristic
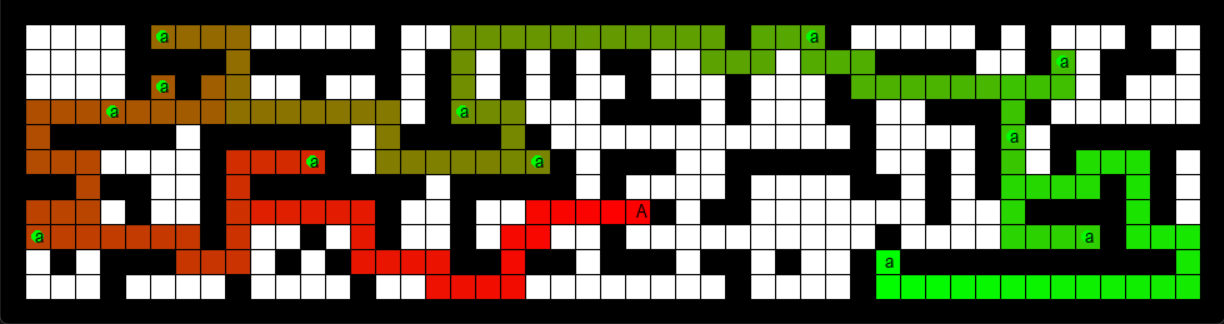
We now generalize single goal grid search to finding the shortest
path in multi goal grid search. There are 2 “TODO(IV)” for you to
complete in state.py.
Multiple goals requires a new heuristic. The one we use is based on the Minimum Spanning Tree (MST). Specifically, given a state and a set of goals, the heuristic cost for visiting all the goals is computed as follows:
We provide you with most of the code you need to compute this MST
heuristic, you can call
compute_mst_cost(self.goal, manhattan) to compute the cost
of the minimum spanning tree for a set of goals. Note that
because computing the mst takes some time, you should store the computed
mst values in the cache we provide you.
You also need to implement the other AbstractState
methods of MultiGoalGridState. Be careful! They are not
necessarily the same as for single goal search. In particular, think
about whether self.state alone is sufficient for
determining whether two states are the same. If the agent has two goals
left to visit and is in position \((x,y)\) or has only one goal left to visit
but is in the same position \((x,y)\),
is this the same state? No! Your visited_states dictionary
and frontier need to know when two states are the same,
which must be reflected in the __eq__ and
__hash__ methods…
You can test your code with:
python3 main.py --problem_type=GridMultiGoal --use_heuristic --maze_file=[path_to_maze_file in data/grid_multi_goal]Once again, if you would like to also visualize the resulting
solution in PyGame add the --show_maze_vis flag.
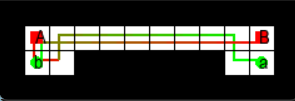
We now change our state space to include multiple agents, each of
which has a single goal. We want to find the shortest path, which in
this case means the sequence of actions for all agents that gets the
last agent to their goal the fastest (this is called the makespan). For
this problem you will finish the implementation of
MultiAgentGridState. In particular, you should implement
one admissible and one inadmissible heuristic, both of which must be at
least as good as ours on the autograder with respect to number of states
explored and path length. In get_neighbors you will now
need to check for inter-agent collision, which can occur when two agents
cross paths (swap cells) or try to move to the same cell at the same
time. There are 2 TODO(V) for you to complete.
You can test your code with:
python3 main.py --problem_type=GridMultiAgent --use_heuristic --maze_file=[path_to_maze_file in data/grid_multi_agent] --heuristic_type=[admissible, inadmissible] --allow_waitingDon’t forget the --allow_waiting flag, which allows
agents to stay in place. Notice the --heuristic_type flag,
which determines which heuristic function to use.
Once again, if you would like to also visualize the resulting
solution in PyGame add the --show_maze_vis flag.
Submit the main part of this assignment by uploading
search.py and state.py to Gradescope.
You are expected to be familiar with the general policies on the course syllabus (e.g. academic integrity) and on the top-level MP page (e.g. code style). In particular, notice that this is an individual assignment.