Some sections are replicated from MP11 here, but please refer back to MP11 for complete technical details.
With our environment defined, we can now move on to the agent. The agent operates in the environment by defining a Markov Decision Process (MDP), which contains
In each timestep, your agent will choose an action from the set
{UP, DOWN, LEFT, RIGHT}. You should use the respective
variables defined in utils.py for these quantities.
In each timestep, your agent will receive a reward from the environment after taking an action. The rewards are:
You will create a snake agent that learns how to get as many food pellets as possible without dying, which corresponds to maximizing the reward of the agent. In order to do this, we will use the Q-learning algorithm. Your task is to implement the TD Q-learning algorithm and train it on the MDP outlined above.
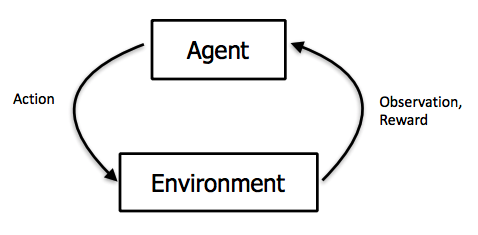
In Q-learning, instead of explicitly learning a representation for transition probabilities between states, we let the agent observe its environment, choose an action, and obtain some reward. In theory, after enough iterations, the agent will implicitly learn the value for being in a state and taking an action. We refer to this quantity as the Q-value for the state-action pair.
Explictly, our agent interacts with it’s environment in the following feedback loop:
Often, the notations for the current state \(s_t\) and next state \(s_{t+1}\) are written as \(s\) and \(s'\), respectively. Same for the current action \(a\) and next action \(a'\).
The Q update formula is:

where \(\gamma\) is the Temporal-Difference (TD) hyperparameter discounting future rewards, and
\[ \alpha = \frac{C}{C + N(s,a)} \]
is the learning rate controlling how much our Q estimate should change with each update. Unpacking this equation: \(C\) is a hyperparameter, and \(N(s,a)\) is the number of times the agent has been in state \(s\) and taken action \(a\). As you can see, the learning rate decays as we visit a state-action pair more often.
With its current estimate of the Q-states, the agent must choose an “optimal” action to take. However, reinforcement learning is a balancing act between exploration (visiting new states to learn their Q-values) and greed (choosing the action with the highest Q-value). Thus, during training, we use an exploration policy defined below:
\[ a^* = \text{argmax}_{a}\ \ f(Q(s,a), N(s,a))\] \[ f(Q(s,a), N(s,a)) = \begin{cases}1 & N(s,a) < Ne \\ Q(s,a) & else\end{cases}\]
where \(Ne\) is a hyperparameter. Intuitively, if an action hasn’t been explored enough times (when \(N(s,a) < Ne\)), the exploration policy chooses that action regardless of its Q-value. If there are no such actions, the policy chooses the action with the highest Q value. This policy forces the agent to visit each state and action at least \(Ne\) times.
Implementation Note: If there is a tie among
actions, break it according to the priority order
RIGHT > LEFT > DOWN > UP.
When implmenting Q-learning as described above, you will need to read
and update Q and N-values. For this, we have created appropriately large
tables that are defined in the Agent constructor in agent.py. You should
read and write from these tables, as we will be grading part of your
implementation on their contents. The order of parameters in the Q and
N-tables are mentioned at the end of these instructions. Alternatively,
you can look in the body of create_q_table() in utils.py to
see how they are initialized.
Update the N-table before the Q-table, so that the learning rate for the very first update will be a little less than 1. This is an arbitrary choice (as long as the learning rate decays with time we effectively get the same result), but it is necessary to get full-credit on the autograder. To make your code cleaner, we recommend doing the N and Q-updates right next to each other in the code.
When testing, your agent no longer needs to update either table. Your agent just needs to observe its environment, generate the appropriate state, and choose the optimal action without the exploration function.
Implementation Note: Don’t forget the edge case for
updating your Q and N tables when \(t=0\). At \(t =
0\), both \(s\) and \(a\) will be None. In that
case, is there anything for us to update the Q and N-tables with? Only
at \(t = 1\) will \(s\) and \(a\) correspond to a state and action for
which you need to update the tables.
Implementation Note: When the agent “dies”, any arbitrary action can be chosen as the game will be reset before the action can be taken. This does not need to be recorded in the Q and N tables. But, you will still need to update Q and N for the action you just took that caused the death.
The autograder will train and test your agent given a certain set of parameters. It will initialize the environment with various values for the initial snake and food pellet positions. The first random choice by the environment happens when it chooses a position for the second food pellet, so your Q and N-tables should exactly match ours through the time when the first food pellet is eaten.
The first set of tests will check if your Q and N-tables match ours up to the first pellet being eaten. We have provided for you 3 example tests for you to test locally:
snake_head_x=5, snake_head_y=5, food_x=2, food_y=2, width=18, height=10, rock_x=3, rock_y=4, Ne=40, C=40, gamma=0.7snake_head_x=5, snake_head_y=5, food_x=2, food_y=2, width=18, height=10, rock_x=3, rock_y=4, Ne=20, C=60, gamma=0.5snake_head_x=3, snake_head_y=4, food_x=2, food_y=2, width=10, height=18, rock_x=5, rock_y=5, Ne=30, C=30, gamma=0.6For your convenience, we have provided the expected Q and N-tables of these tests in the template code’s data folder. The file checkpoint1.npy corresponds to Test 1, checkpoint2.npy to Test 2, and checkpoint3.npy to Test 3.
The major tests on the autograder will train your agent for thousands
of episodes/games. In order to pass them, your code should not take too
long and score enough points on average. You can test this locally as
well by utilizing the command-line program mp11_12.py. We
will train the agent with a specific set of parameters and test it with
three different settings. The autograder will have one more hidden test
setting.
To see the available parameters you can set for the game, run:
python mp11_12.py --helpTo train and test your agent, run:
python mp11_12.py [parameters]For example, to run Test 1 above, run:
python mp11_12.py --snake_head_x 5 --snake_head_y 5 --food_x 2 --food_y 2 --width 18 --height 10 --rock_x 3 --rock_y 4 --Ne 40 --C 40 --gamma 0.7 This will train the agent, test it, and save a local copy of your Q and N-tables in checkpoint.npy and checkpoint_N.npy, respectively.
By default, it will train your agent for 10,000 games and test it for
1000, though you can change these by modifying the
--train-episodes and --test-episodes arguments
appropriately. In addition, it will also display some example games of
your trained agent at the end! (If you don’t want this to happen, just
change the --show-episodes argument to 0)
If you wish to compare your Q-tables and N-tables to the references, we have included a python script for doing so in checkck.py. This script can be used for 3 test cases:
python check.pyPlease look in the file check.py and uncomment the lines
for the test you’re using.
You will not be tested on parameter tuning to achieve a high number of points. The autograder will pass in our choice of hyperparameter values. (So do not hard code them!) If you have implemented Q-learning correctly, you should pass all the tests with full credit. However, for fun, we recommend playing around with the hyperparameters to see how well you can train your agent!
Trained Agent
The file template.zip contains the supplied code (described below) and the debugging examples described above.
Do not import any non-standard libraries except pygame and numpy
Use numpy version <= 1.21.3.
mp11_12.py - This is the main file that starts the program. This file runs the snake game with your implemented agent acting in it. The code runs a number of training games, then a number of testing games, and then displays example games at the end.
snake.py - This file defines the snake environment and creates the GUI for the game.
utils.py - This file defines environment constants as defined above and contains the functions to save and load models.
agent.py This is the file where you will be doing all of your work. This file contains the Agent class. This is the agent you will implement to act in the snake environment.
You should submit the file agent.py on Gradescope.
Inside agent.py, you will find the following
variables/methods of the Agent class useful:
self._train, self._test: These
boolean flags denote whether the agent is in train or test mode. In
train mode, the agent should explore (based on the exploration function)
and exploit based on the Q table. In test mode, the agent should purely
exploit and always take the best action. You may assume that these
variables are set appropriately. You do not need to change
them.
self.Q, self.N: These numpy
matrices hold the Q and N-tables, respectively. They are both of shape
(NUM_FOOD_DIR_X, NUM_FOOD_DIR_Y, NUM_ADJOINING_WALL_X_STATES, NUM_ADJOINING_WALL_Y_STATES, NUM_ADJOINING_BODY_TOP_STATES, NUM_ADJOINING_BODY_BOTTOM_STATES, NUM_ADJOINING_BODY_LEFT_STATES, NUM_ADJOINING_BODY_RIGHT_STATES,NUM_ACTIONS)
self.Ne, self.C, self.gamma:
Self-explanatory hyperparameters
self.reset(): This function resets
the environment from the agent’s perspective and should be run when the
agent dies.
self.points, self.s, self.a: These
variables should be used to store the points, state, and action,
respectively, for bookkeeping. That is, they will be helpful in
computing whether a new food pellet has been eaten, in addition to
storing previous state-action pairs that will be useful when
doing Q-value updates.
act(environment, points, dead):
This is the main function you will implement in MP12
and is called repeatedly by mp11_12.py while games are
being run. This is the main function to implement for MP12.
update_n(self, state, action):
Update the N-table. See self.N and the section Q-learning agent. implemented in
MP11
update_q(self, s, a, r, s_prime):
Update the Q-table. See self.Q and the section Q-learning agent. implemented in
MP11
generate_state(self, environment):
Discretizes the state, using the environment, which is later used in the
Q-learning computation. implemented in MP11