|
|
CS440/ECE448 Fall 2023Assignment 6: Configuration Space PlanningDue date: Monday, October 16 11:59pm |
In this assignment you will write code that transforms a shapeshifting alien path planning problem into a graph search problem. See the Robotics sections of the lectures for background information.
General guidelines
Basic instructions are the same as in MP 1. Specifically, you should be using Python 3.8 with pygame installed, and you will be submitting the code to Gradescope. Your code may import modules that are part of the standard python library, and also numpy and pygame.
For general instructions, see the main MP page and the syllabus.
You will need to adapt your A* code from MP 2.
Problem Statement
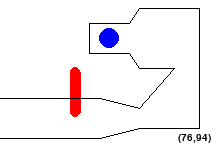
- It can move the (x,y) position of its center of mass.
- It can switch between three forms: a long horizontal form, a round form, and a long vertical form.
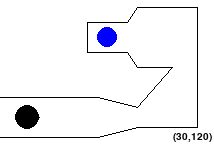
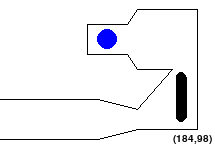
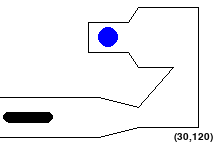
![]()
For each planning problem you will be given a 2D environment specified by:
- The size of the workspace.
- The widths of the long and round forms.
- The starting (x,y) center-of-mass position and shape of the alien.
- A list of waypoints, described by an (x, y) position.
- A list of goals, each of which is defined by an (x, y) position.
- A set of obstacles, each of which is a line segment.
We consider the maze solved once the alien's centroid is at the goal position, as long as the alien is not violating any constraint (i.e., not out of bounds or touching a wall).
To solve MP5 and MP6, you will go through three main steps:
- Write geometry functions to check if straight-line paths are valid.
- Finish implementing a new state representation for this problem.
- Adapt your MP3/4 State and A* code to be able to search in three dimensions.
Part 0: Understanding Map configuration
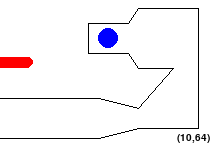
Each scene (or problem) is defined in a settings file. We wrote the code to read each settings file for you.[Test1] Window : (300, 200) # (Width, Height) Obstacles : [ (0,100,100,100), #(startx,starty,endx,endy) (0,140,100,140), (100,100,140,110), (100,140,140,130), (140,110,175,70), (140,130,200,130), (200,130,200,10), (200,10,140,10), (175,70,140,70), (140,70,130,55), (140,10,130,25), (130,55,90,55), (130,25,90,25), (90,55,90,25) ] Goals : [ (110, 40, 10) # (x-coordinate, y-coordinate, radius) ] Lengths: [40,0,40] Widths: [11,25,11] StartPoint: [30,120]
- Window: The window size for the given example map is 300x200 pixels. Note that (0, 0) is the top-left corner and (300, 200) is the bottom-right corner .
- Lengths: The lengths of the robot are in the form ['Horizontal Length', 'Ball length (always 0)', 'Vertical Length']. The length of the robot is defined by the distance between its head and tail
- Widths: widths of the robot represent the radius of the circle that is added to the line segment "body" of the alien, i.e.. how far away from the line segment defining the body is still considered to be "inside" the robot. These are ordered in the same manner as the Lengths
- Obstacles: There are many walls in the maze which are represented by a list of endpoints for line segments in the format (startx, starty, endx, endy)
- A list of waypoints and a list of goals specified in the form (x,y,radius). In this particular maze, there is one goal at (110,40).
- The alien is set to start at the position (30,120), in its default disk configuration
- The name of this map is Test1
Here is how the map from this configuration looks without waypoints:
python3 mp5_6.py --human --map Test1 --config maps/test_config.txtFeel free to modify the config files to do more self tests by adding test maps of your own.
Once the window pops up, you can manipulate the alien using the following keys:
- w / a / s / d: move the alien up / left / down/ right
- q / e: switch between horizontal, ball, and vertical forms of the alien. "q" will cycle backwards (Vertical -> Ball -> Horizontal) and "e" will cycle forwards (Horizontal -> Ball -> Vertical
Part 2: Adapt A*
The first part of this MP is to extend your A* code from MP 3/4 to handle our new 3D state representation. Your A* code must be able to handle the possibility that there are multiple goals. However, unlike MP 3/4, your code does not have to touch all the goals. It should consider the maze "solved" when it reaches the first goal. Your new A* code should be added to this file:- astar(maze): returns optimal path in a list, which contains start and objectives. If no path found, return None.
- backtrack(visited_states, current_state): this should be similar to your MP 3/4 implementation.
Part 3: Searching the path in Maze
python3 mp5_6.py --map [MapName] --config maps/test_config.txtWhere MapName is in [Test1,Test2,Test3,Test4,NoSolutionMap]. If all your parts are implemented correctly, you should see an animation of the solution you just found playing in the main screen (you can press escape to kill it).
Provided Code Skeleton and Deliverables
You should use your code from MP5 for this MP. this zip file. You will only have to modify and submit following files:
- geometry.py
- search.py
- maze.py
- state.py
Do not modify other provided code. It will make your code not runnable.
You can get additional help on the parameters for the main MP program by typing python3 mp5_6.py -h into your terminal.
Please upload search.py, state.py, maze.py, and geometry.py (all together) to gradescope.
Do not submit extra files to gradescope.