Computer vision can used for four basic types of tasks:
In its most basic form, classification involves coming up with a single label to describe the contents of an image. For example, the lefthand picture below shows an apple; the righthand picture shows a mug.


Using deep neural networks, top-5 error rates for classification on Imagenet (one standard benchmark set of labelled images) have gone from 27% in 2010 to <5% in 2015. Unfortunately, we have a rather poor model of why these networks work well, and how to construct good ones. As we will see later on, neural nets also have a tendency to fail unexpectedly.
Recently, classifiers have been extended to work on more complex scenes. This involves two tasks which could theoretically be done as one step but frequently are not. First, we detect objects along with their approximate location in the image, producing a labelled image like the one below. This uses a lot of classifiers and works only on smallish sets of object types (e.g. tens, hundreds).
from Lana Lazebnik
When an object is mentioned in an image caption, similar methods can be used to locate the object in the image. After an object has been detected and approximately located, we can "register" it. That is, we can produce its exact position, pose, orientation.
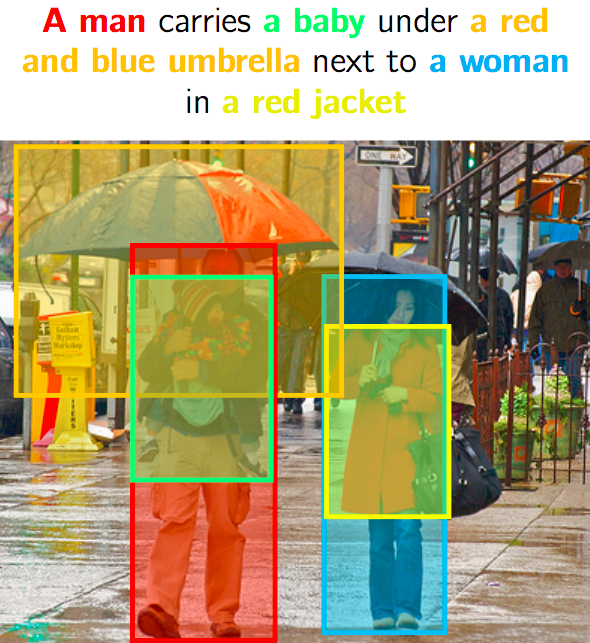
There has also been some success at labelling "semantic" roles in images, e.g. who is the actor? what are they acting on? what tool are they using? In the examples below, you can see that many roles are successfully recovered (green) but some are not (red). This kind of scene analysis can be used to generate captions for images and answer questions about what's in a picture.

from Yatskar, Zettlemoyer, Farhadi, "Situation Recognition" (2016)
We can also reconstruct aspects of the 3D scene, without necessarily doing a deeper analysis or associating any natural language labels. Suppose, for example, that we have two pictures of a scene, either from a stereo pair of cameras or a moving camera. Notice that distant objects stay in approximately the same image position but closer objects move significantly.


It's fairly common that we know the relative positions of the two cameras. For example, they may both be mounted on the same robot platform. Human eyes are another example. In this situation, it's easy to turn a pair of matching features into a depth estimate. (See diagram below.) These depth estimates are highly accurate for objects near the observer, which conveniently matches what we need for manipulating objects that are within grabbing distance. People who lack stereo vision can get similar information by moving their heads.
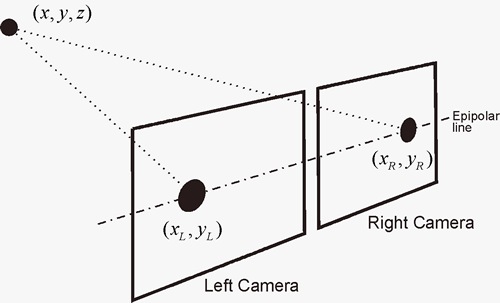
from Derek Hoiem
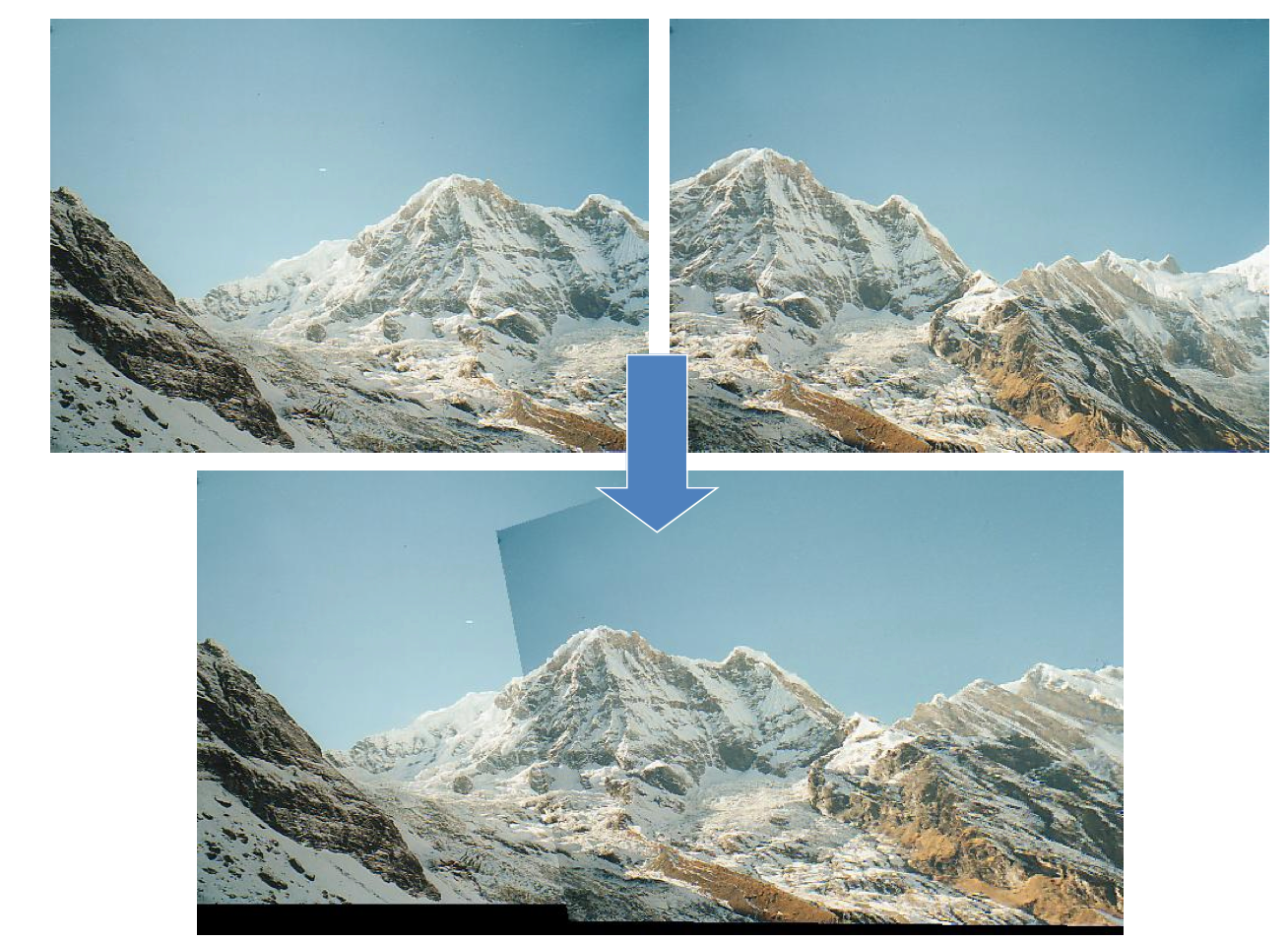
More interestingly, we can reconstruct the camera motion if we have enough matched features. For example, we can extract local features from a pair of images and use these as guidepoints to merge the two images into one. We can reconstruct a 3D scene down to very fine details if we have enough pictures. So we can send a drone into a space that is hazardous or inconvenient for humans to visit, and then direct a human inspector to problematic features (e.g. evidence of cracking in bridge supports).
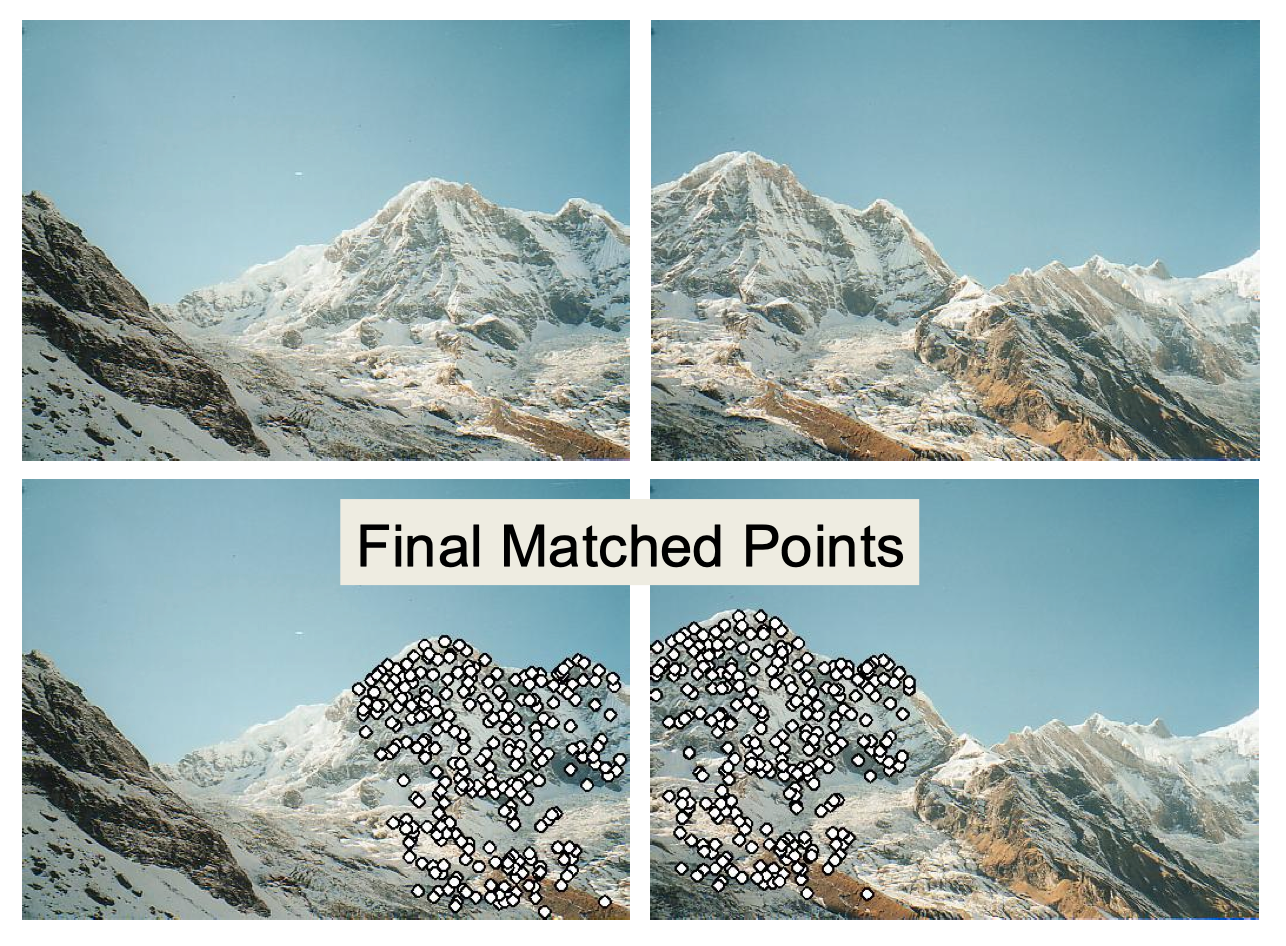
from Derek Hoiem
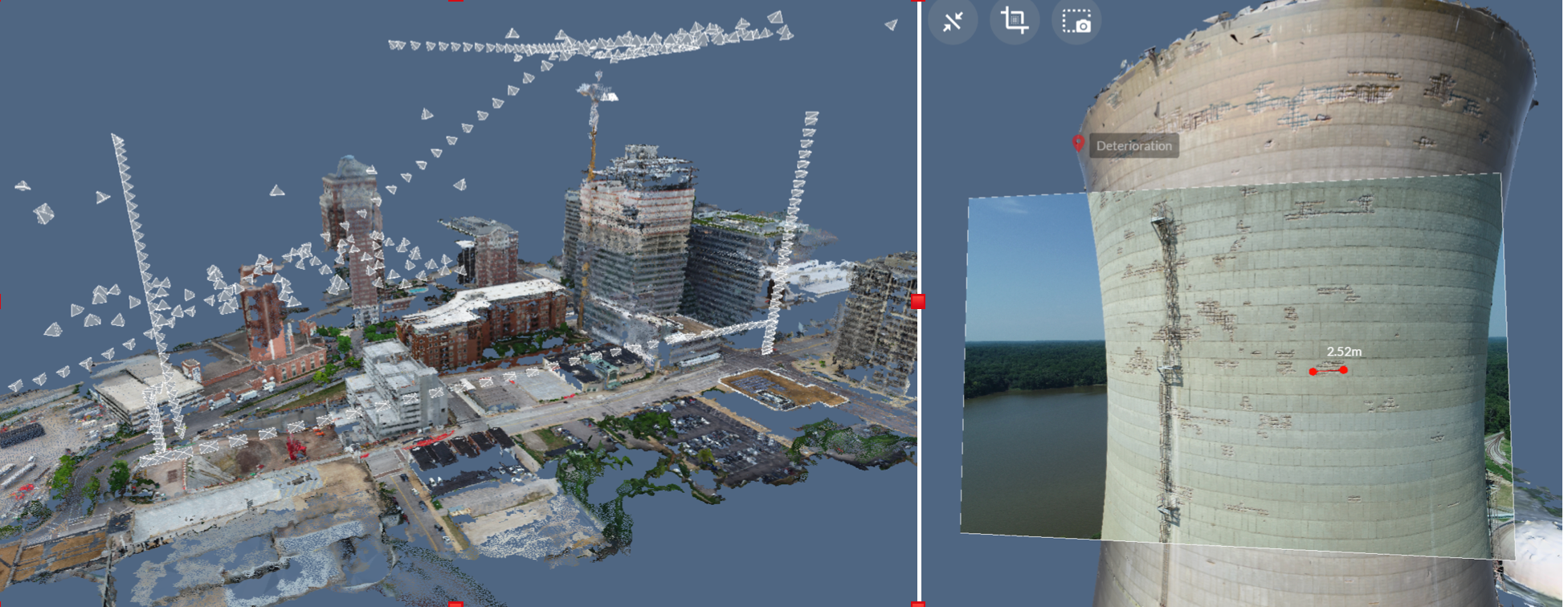
from Derek Hoiem
When you have enough training examples, or enough prior knowledge, it's possible to reconstruct 3D information from a single image. For example, a mobile robot might extract the sides of this path, use their vanishing point to guess the tilt, and figure out that the blue object is something that might block its route. In this case, it's a jacket, so some robots might be able to drive over it. But it could have been a large rock.

More interestingly, we can extract a 3D model for indoor scenes using our knowledge of typical room geometry, likely objects, etc. In the picture below, a program has outlined the edges delimiting the floor, ceiling, and walls.
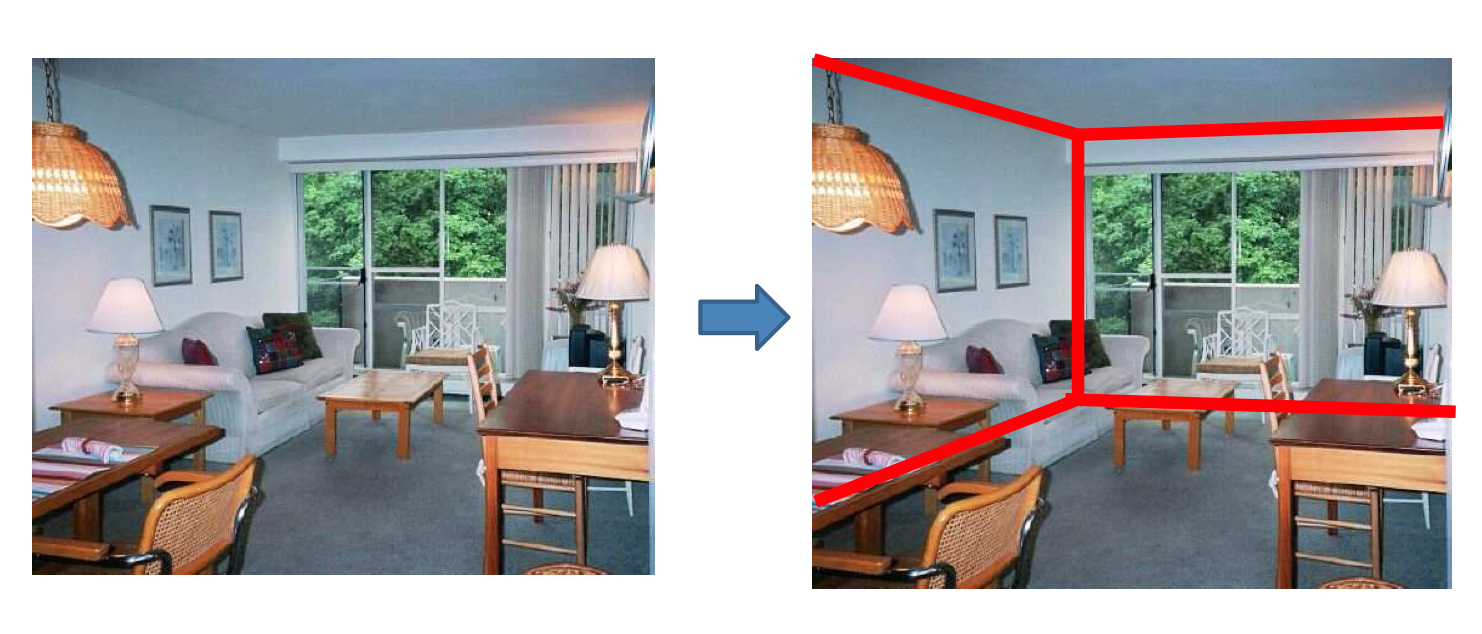
from Derek Hoiem
Relatively recent neural net algorithms can create random images similar to a set of training images. This can be done for fun (e.g. the faces below). A serious application is creating medical images that can be for teaching/research, without giving away private medical data. Can work very well: doctors find it very hard to tell real xray images from fake ones.

from StyleGAN by Karras, Laine, Aila (NVIDIA) 2019
More interestingly, suppose that we have a 3D model for the scene. We now have enough information to add objects to the scene and make the result look right. (See picture below.) The 3D model is required to make objects sit correctly on surfaces (rather than hovering somewhere near them), give the object appropriate shading, and make light from (or bouncing off of) the object affect the shading on nearby objects. We can also remove objects, by making assumptions about what surface(s) probably continue behind them. And we can move objects from one picture into another.

Karsh, Hedau, Forsyth, Hoiem "Rendering Synthetic Objects into
Legacy Photographs" (2011)
Here is a cool video showing details of how this algorithm works (from Kevin Karsh).
A much harder, but potentially more useful, task would be to predict the future from our current observations. For example, what's about to happen to the piece of ginger in the picture below?
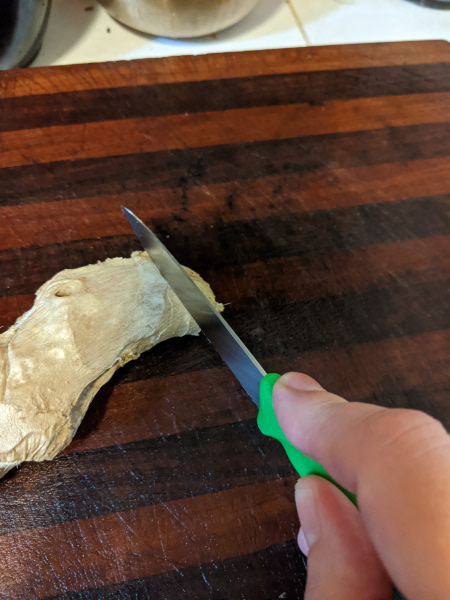
Some predictions require sophisticated understanding of the scene. But, interestingly, others do not. If an object is moving directly towards you, it expands in your field of view without moving sideways. Moreover, the time to collision is its size in the image times the derivative of the size. Humans and many other animals use this trick to quickly detect potential collisions. Collision avoidance is one of the main roles of the low-resolution peripheral vision in humans.