 (from Google maps)
(from Google maps)
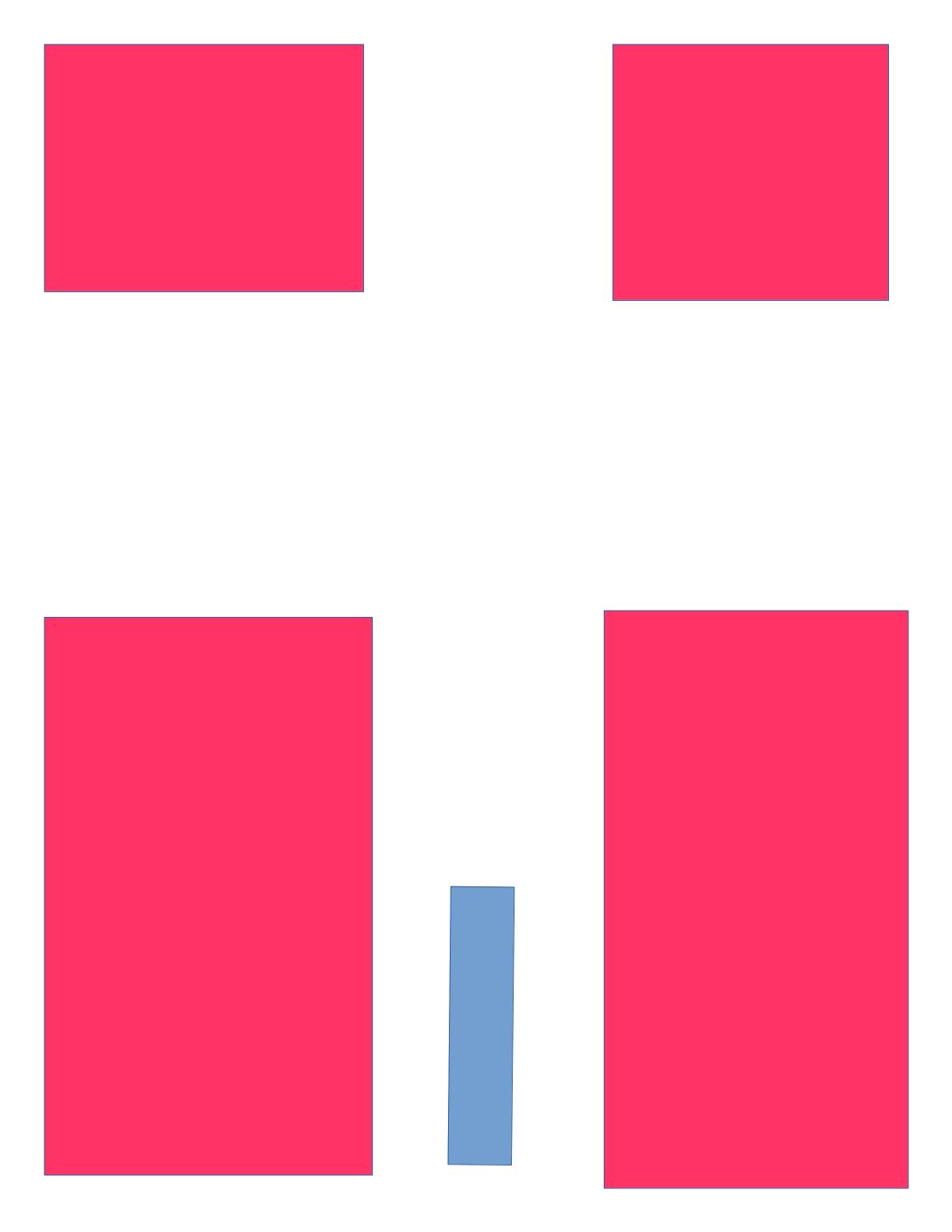
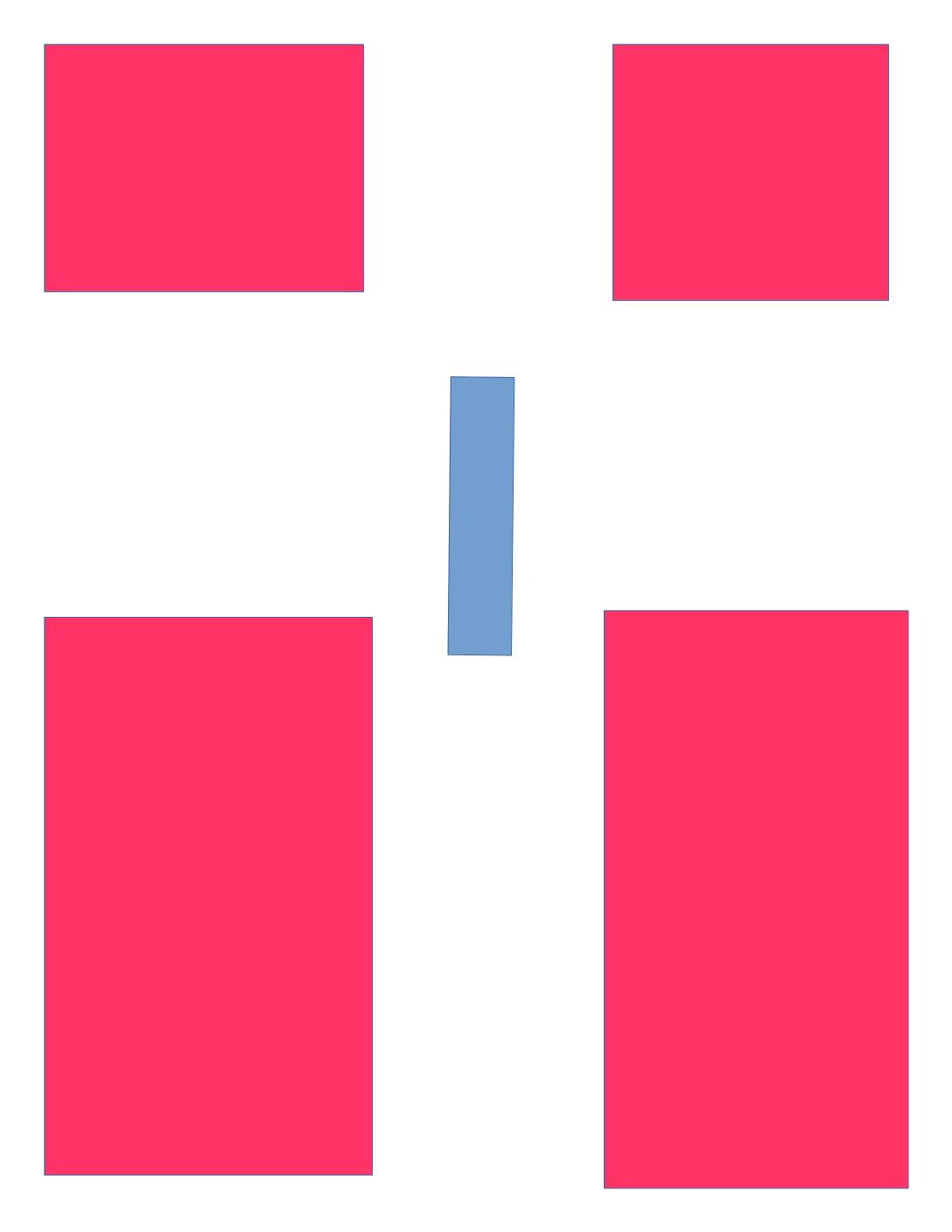
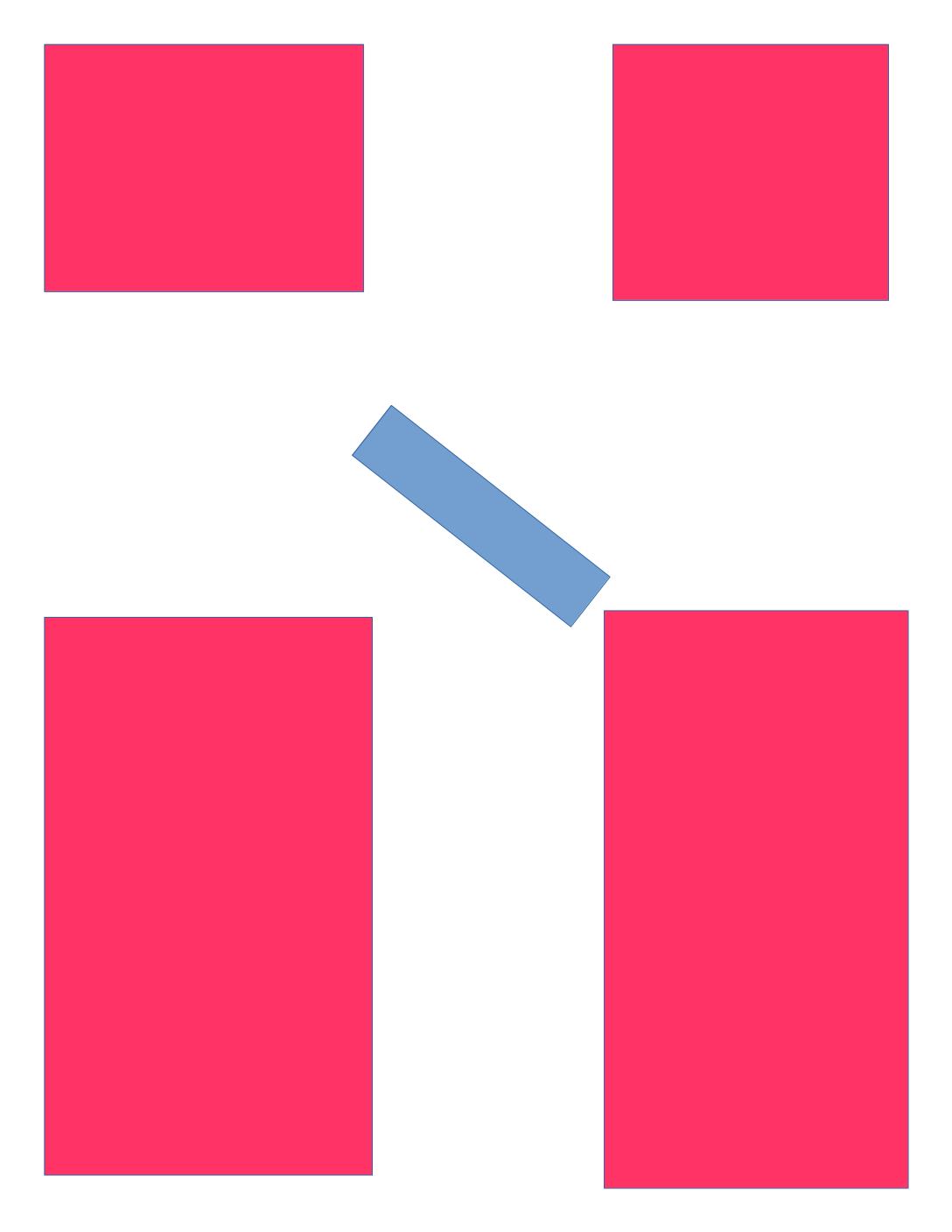
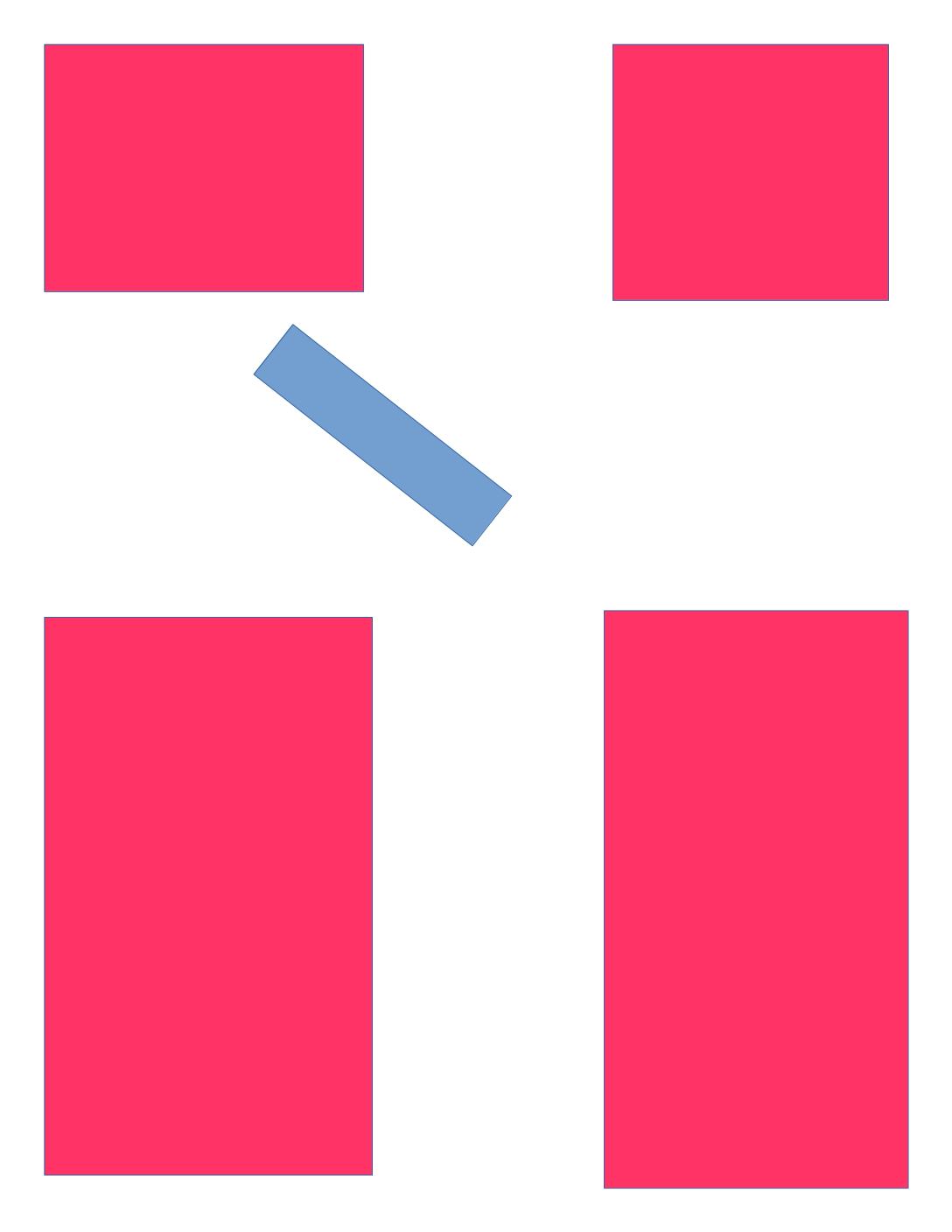
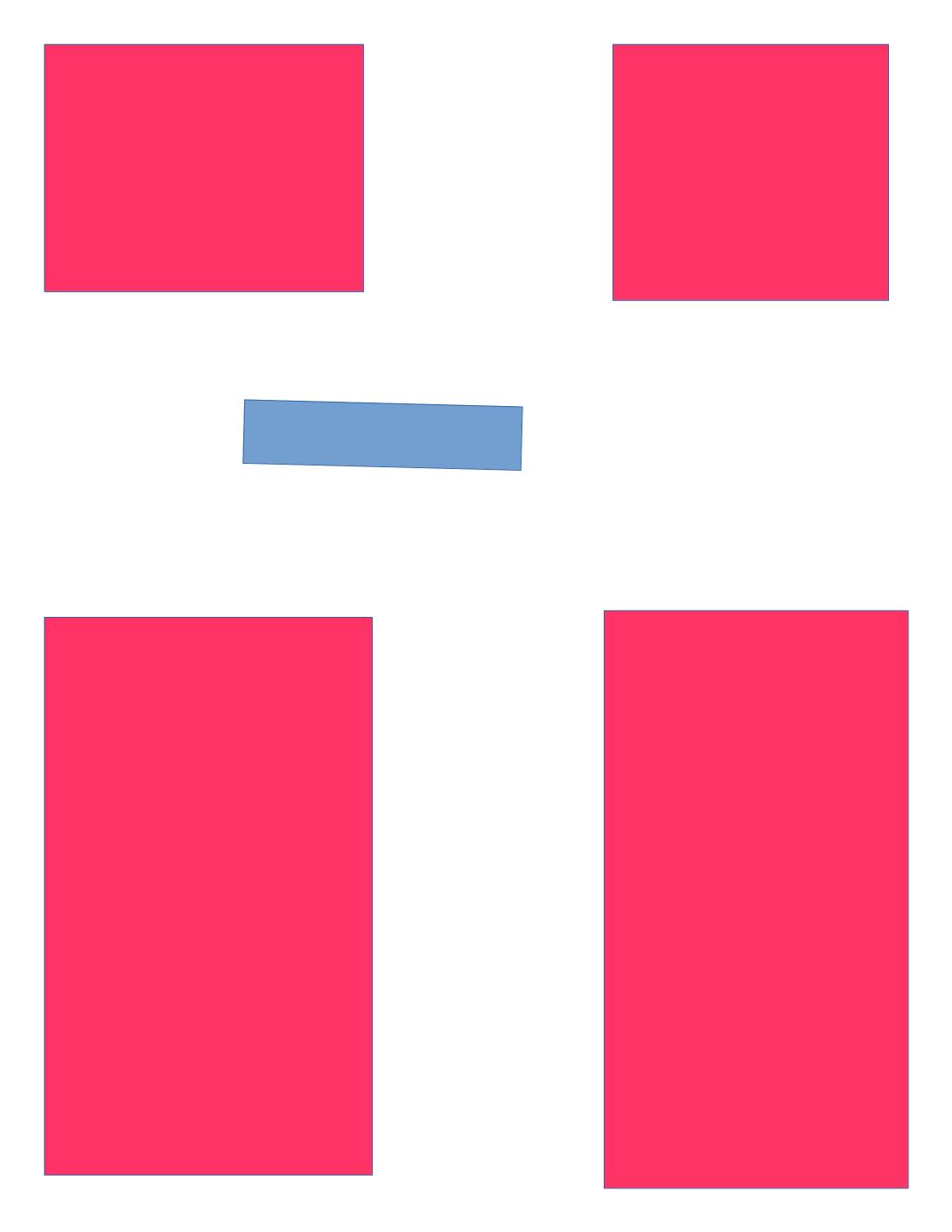
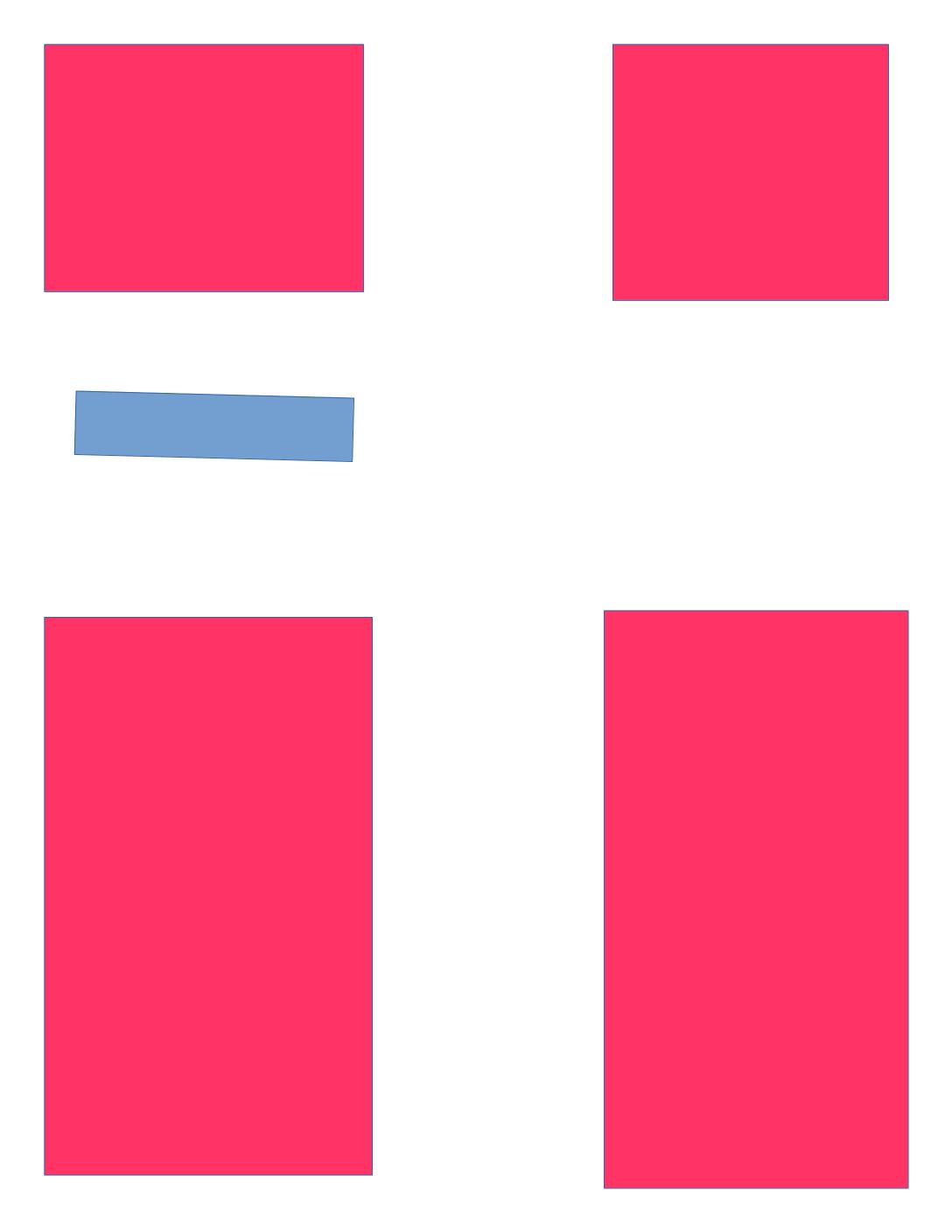
Now consider a polygonal robot moving around in 2D. For example, a car or truck might be moving around the roads near the Siebel Center shown in the areal view above. In the simplified map below , we have two crossing roads defined by four obstacles (red). The car (blue) can move forwards and rotate.
|
|
|
|
|
|
|---|
To specify the robot's position, we need to give its (x,y) position and also its orientation. So the robot's configuration space is three dimensional.
See the following slides for two worked examples from Howie Choset:
So this 2D problem with simple polygonal obstacles has a 3D configuration space with quite complex obstacles.
The dimensionality of the configuration space gets even larger in many real-world situations. For example, if we