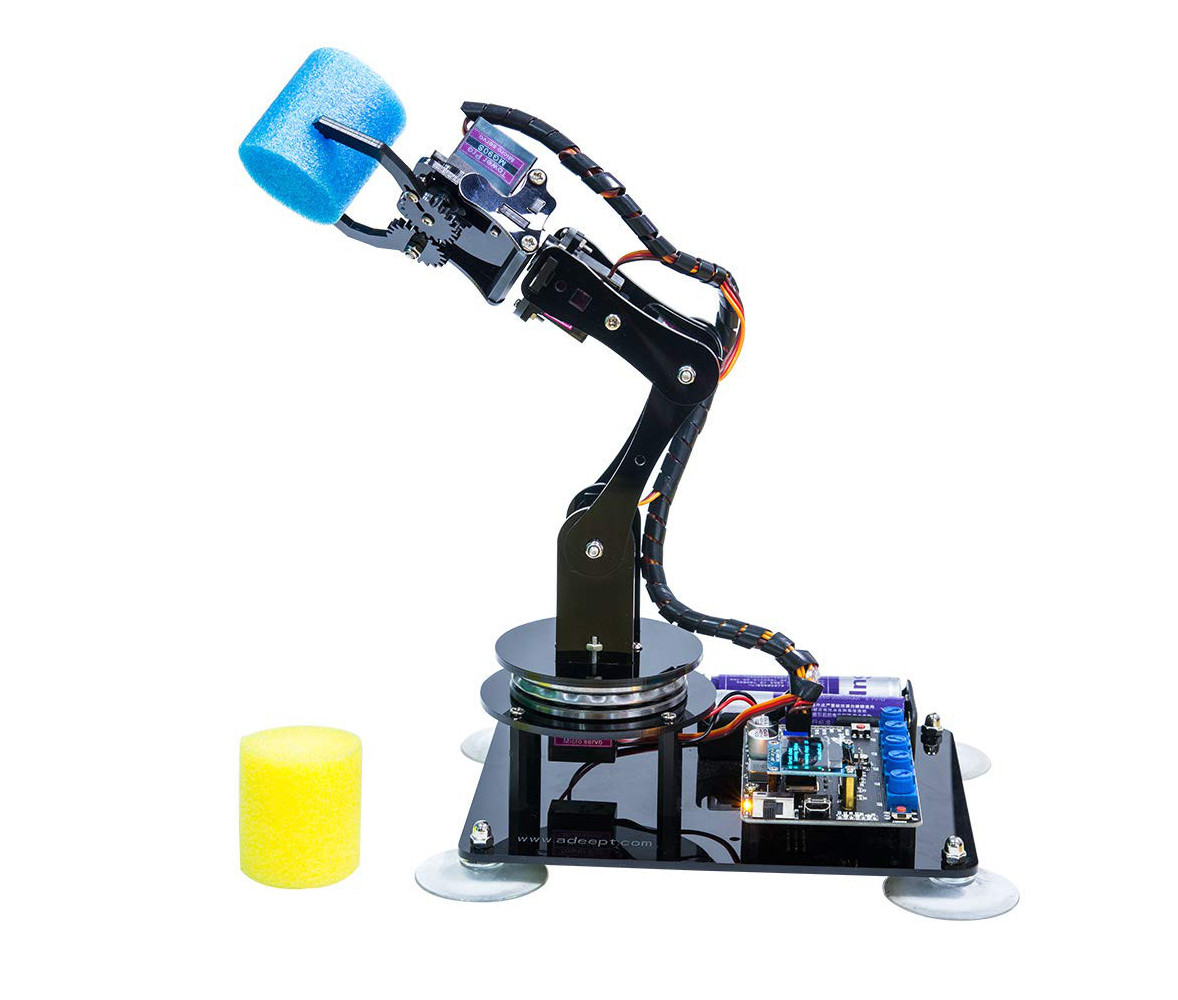
 Adeept robot arm for Arduino (from Amazon)
Adeept robot arm for Arduino (from Amazon)
Robots can also be jointed arms, mounted on a fixed base or a mobile one. This were originally used primarily for industrial assembly, due to safety concerns. As they have become smaller and more reliable, we also see human-facing applications.
Highlights of the Hannover MESSE 2017
Parts assembly: Allied-Technology.com Tabletop Demo of Small Parts Assembly
Some robots hang from the ceiling, e.g. this chef robot from Samsung:
 from
the Robb Report
from
the Robb Report
Samsung chef robot video at CES 2020
Planning motions of for jointed arms is made complex by the need to translate between real-world coordinates and joint angles. We'll see the details soon.
Also, very accurate positioning requires that links remain stiff, which ends up requiring very heavy robots for absurdly small payloads. E.g. a very accurate person-sized robot may have only a 10lb payload. Both high-level and low-level planning are more complicated when links may flex and/or there is significant error in positioning.
Very early robots such as Shakey moved around a world that was largely static and easy to figure out from camera images. Objects moved only when the robot made them move. (Any grad student helpers would be sneaking around behind its back.)
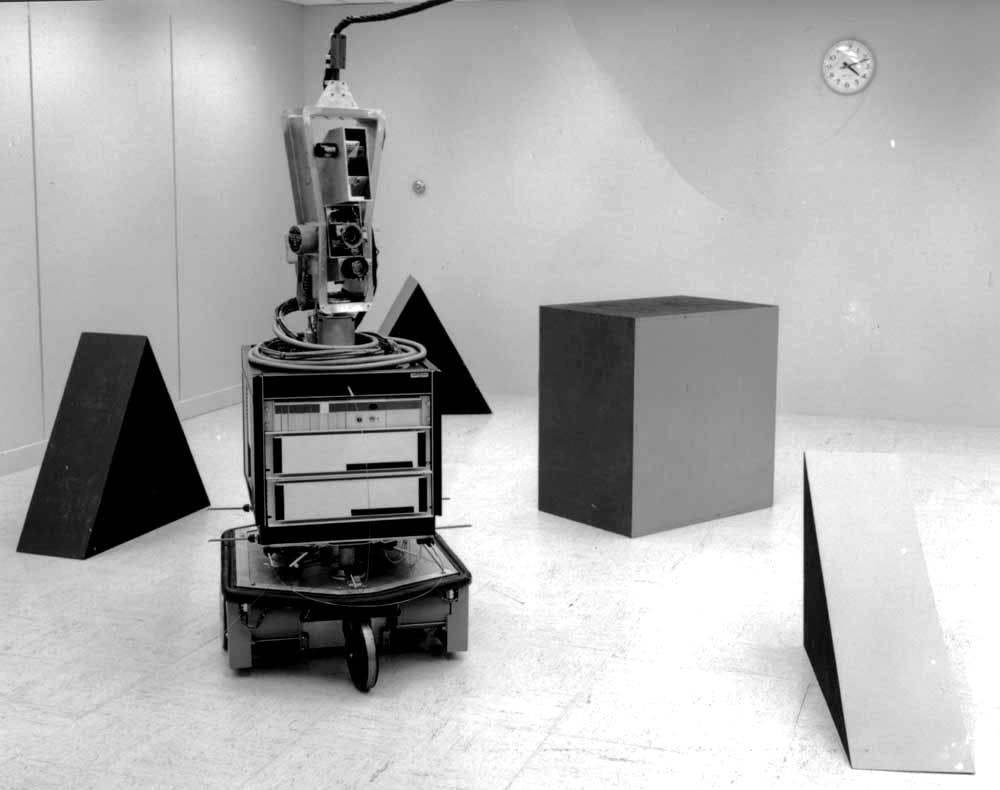 (from
New Atlas)
(from
New Atlas)
As AI systems have gotten more capable, they have moved into more relaistic environments:
Video of robots working as a team: U. Penn drones play James Bond