Singular Value Decompositions
Learning Objectives
- Construct an SVD of a matrix
- Identify pieces of an SVD
- Use an SVD to solve a problem
Singular Value Decomposition
An \(m \times n\) real matrix \({\bf A}\) has a singular value decomposition of the form
where
- \({\bf U}\) is an \(m \times m\) orthogonal matrix whose columns are eigenvectors of \({\bf A} {\bf A}^T\). The columns of \({\bf U}\) are called the left singular vectors of \({\bf A}\).
- \({\bf \Sigma}\) is an \(m \times n\) diagonal matrix of the form:
where and \(\sigma_1 \ge \sigma_2 \dots \ge \sigma_s \ge 0\) are the square roots of the eigenvalues values of \({\bf A}^T {\bf A}\). The diagonal entries are called the singular values of \({\bf A}\).
Note that if , then and both have the same eigenvalues:
(left-multiply both sides by )
- \({\bf V}\) is an \(n \times n\) orthogonal matrix whose columns are eigenvectors of \({\bf A}^T {\bf A}\) The columns of \( {\bf V}\) are called the right singular vectors of \({\bf A}\).
Time Complexity
The time-complexity for computing the SVD factorization of an arbitrary \(m \times n\) matrix is proportional to , where the constant of proportionality ranges from 4 to 10 (or more) depending on the algorithm.
In general, we can define the cost as:
Reduced SVD
The SVD factorization of a non-square matrix \({\bf A}\) of size \(m \times n\) can be represented in a reduced format:
- For \(m \ge n\): \({\bf U}\) is \(m \times n\), \({\bf \Sigma}\) is \(n \times n\), and \({\bf V}\) is \(n \times n\)
- For \(m \le n\): \({\bf U}\) is \(m \times m\), \({\bf \Sigma}\) is \(m \times m\), and \({\bf V}\) is \(n \times m\) (note if \({\bf V}\) is \(n \times m\), then \({\bf V}^T\) is \(m \times n\))
The following figure depicts the reduced SVD factorization (in red) against the full SVD factorizations (in gray).

In general, we will represent the reduced SVD as:
where is a matrix, is a matrix, is a matrix, and .
Example: Computing the SVD
We begin with the following non-square matrix, \({\bf A}\)
and we will compute the reduced form of the SVD (where here ):
(1) Compute \({\bf A}^T {\bf A}\):
(2) Compute the eigenvectors and eigenvalues of \({\bf A}^T {\bf A}\):
(3) Construct \({\bf V}_R\) from the eigenvectors of \({\bf A}^T {\bf A}\):
(4) Construct \({\bf \Sigma}_R\) from the square roots of the eigenvalues of \({\bf A}^T {\bf A}\):
(5) Find \({\bf U}\) by solving \({\bf U}{\bf\Sigma} = {\bf A}{\bf V}\). For our reduced case, we can find \({\bf U}_R = {\bf A}{\bf V}_R {\bf \Sigma}_R^{-1}\). You could also find \({\bf U}\) by computing the eigenvectors of \({\bf AA}^T\).
We obtain the following singular value decomposition for \({\bf A}\):
Recall that we computed the reduced SVD factorization (i.e. \({\bf \Sigma}\) is square, \({\bf U}\) is non-square) here.
Rank, null space and range of a matrix
Suppose is a matrix where (without loss of generality):
We can re-write the above as:
Furthermore, the product of two matrices can be written as a sum of outer products:
For a general rectangular matrix, we have:
where .
If has non-zero singular values, the matrix is full rank, i.e. .
If has non-zero singular values, and , the matrix is rank deficient, i.e. .
In other words, the rank of equals the number of non-zero singular values which is the same as the number of non-zero diagonal elements in .
Rounding errors may lead to small but non-zero singular values in a rank deficient matrix. Singular values that are smaller than a given tolerance are assumed to be numerically equivalent to zero, defining what is sometimes called the effective rank.
The right-singular vectors (columns of ) corresponding to vanishing singular values of span the null space of , i.e. null() = span{, , …, }.
The left-singular vectors (columns of ) corresponding to the non-zero singular values of span the range of , i.e. range() = span{, , …, }.
Example:
The rank of is 2.
The vectors and provide an orthonormal basis for the range of .
The vector provides an orthonormal basis for the null space of .
(Moore-Penrose) Pseudoinverse
If the matrix is rank deficient, we cannot get its inverse. We define instead the pseudoinverse:
For a general non-square matrix \({\bf A}\) with known SVD (\({\bf A} = {\bf U\Sigma V}^T\)), the pseudoinverse is defined as:
For example, if we consider a full rank matrix where :
Euclidean norm of matrices
The induced 2-norm of a matrix can be obtained using the SVD of the matrix :
And hence,
In the above equations, all the notations for the norm refer to the Euclidean norm, and we used the fact that and are orthogonal matrices and hence .
Example:
We begin with the following non-square matrix :
The matrix of singular values, \({\bf \Sigma}\), computed from the SVD factorization is:
Consequently the 2-norm of \({\bf A}\) is
Euclidean norm of the inverse of matrices
Following the same derivation as above, we can show that for a full rank matrix we have:
where is the smallest singular value.
For non-square matrices, we can use the definition of the pseudoinverse (regardless of the rank):
where is the smallest non-zero singular value. Note that for a full rank square matrix, we have . An exception of the definition above is the zero matrix. In this case,
2-Norm Condition Number
The 2-norm condition number of a matrix \({\bf A}\) is given by the ratio of its largest singular value to its smallest singular value:
If the matrix is rank deficient, i.e. , then .
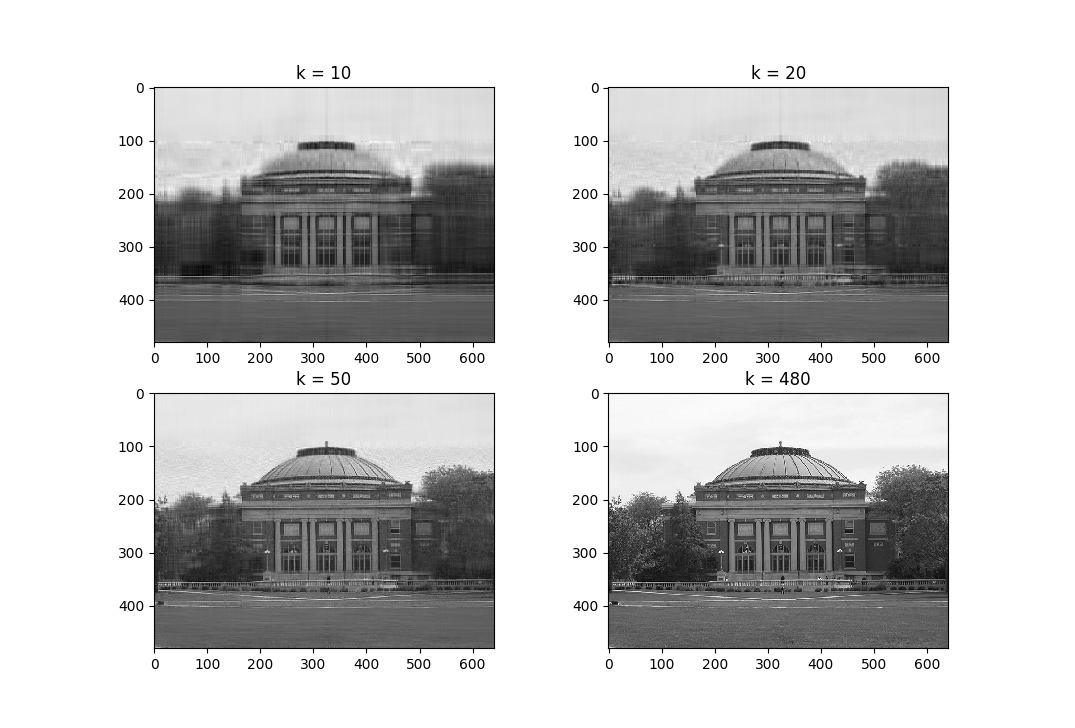
Low-rank Approximation
The best rank- approximation for a matrix , where , for some matrix norm , is one that minimizes the following problem:
Under the induced \(2\)-norm, the best rank-\(k\) approximation is given by the sum of the first \(k\) outer products of the left and right singular vectors scaled by the corresponding singular value (where, \(\sigma_1 \ge \dots \ge \sigma_s\)):
Observe that the norm of the difference between the best approximation and the matrix under the induced \(2\)-norm condition is the magnitude of the \((k+1)^\text{th}\) singular value of the matrix:
Note that the best rank- approximation to can be stored efficiently by only storing the singular values , the left singular vectors , and the right singular vectors .
The figure below show best rank-\(k\) approximations of an image (you can find the code snippet that generates these images in the IPython notebook):
Review Questions
- See this review link
ChangeLog
- 2020-04-26 Mariana Silva mfsilva@illinois.edu: adding more details to sections
- 2018-11-14 Erin Carrier ecarrie2@illinois.edu: spelling fix
- 2018-10-18 Erin Carrier ecarrie2@illinois.edu: correct svd cost
- 2018-01-14 Erin Carrier ecarrie2@illinois.edu: removes demo links
- 2017-12-04 Arun Lakshmanan lakshma2@illinois.edu: fix best rank approx, svd image
- 2017-11-15 Erin Carrier ecarrie2@illinois.edu: adds review questions, adds cond num sec, removes normal equations, minor corrections and clarifications
- 2017-11-13 Arun Lakshmanan lakshma2@illinois.edu: first complete draft
- 2017-10-17 Luke Olson lukeo@illinois.edu: outline