Graphs and Markov chains
Learning Objectives
- Express a graph as a sparse matrix.
- Identify the performance benefits of a sparse matrix.
Graphs
Undirected Graphs:
The following is an example of an undirected graph:
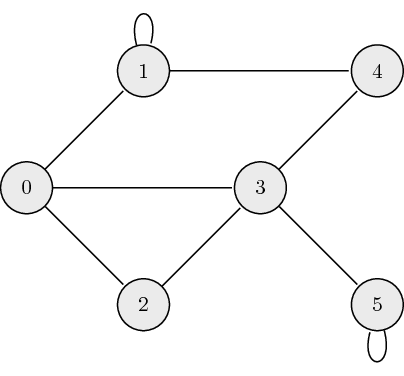
The adjacency matrix, \({\bf A}\), for undirected graphs is always symmetric and is defined as:
where \(a_{ij}\) is the \((i,j)\) element of \({\bf A}\). The adjacency matrix which describes the example graph above is:
Directed Graphs:
The following is an example of a directed graph:
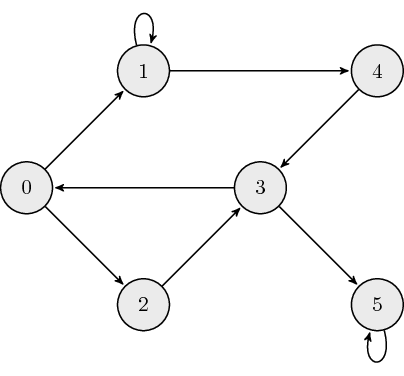
The adjacency matrix, \({\bf A}\), for directed graphs is defined as:
where \(a_{ij}\) is the \((i,j)\) element of \({\bf A}\). The adjacency matrix which describes the example graph above is:
Weighted Directed Graphs:
The following is an example of a weighted directed graph:

The adjacency matrix, \({\bf A}\), for weighted directed graphs is defined as:
where \(a_{ij}\) is the \((i,j)\) element of \({\bf A}\), and \(w_{ij}\) is the link weight associated with edge connecting nodes \(i\) and \(j\). The adjacency matrix which describes the example graph above is:
Typically, when we discuss weighted directed graphs it is in the context of transition matrices for Markov chains where the link weights across each column sum to \(1\).
Markov Chain
A Markov chain is a stochastic model where the probability of future (next) state depends only on the most recent (current) state. This memoryless property of a stochastic process is called Markov property. From a probability perspective, the Markov property implies that the conditional probability distribution of the future state (conditioned on both past and current states) depends only on the current state.
Markov Matrix
A Markov/Transition/Stochastic matrix is a square matrix used to describe the transitions of a Markov chain. Each of its entries is a non-negative real number representing a probability. Based on Markov property, next state vector \({\bf x}_{k+1}\) is obtained by left-multiplying the Markov matrix \({\bf M}\) with the current state vector \({\bf x}_k\).
In this course, unless specifically stated otherwise, we define the transition matrix \({\bf M}\) as a left Markov matrix where each column sums to \(1\).
Note: Alternative definitions in outside resources may present \({\bf M}\) as a right markov matrix where each row of \({\bf M}\) sums to \(1\) and the next state is obtained by right-multiplying by \({\bf M}\), i.e. \({\bf x}_{k+1}^T = {\bf x}_k^T {\bf M}\).
A steady state vector \({\bf x}^*\) is a probability vector (entries are non-negative and sum to \(1\)) that is unchanged by the operation with the Markov matrix \(M\), i.e.
Therefore, the steady state vector \({\bf x}^*\) is an eigenvector corresponding to the eigenvalue \(\lambda=1\) of matrix \({\bf M}\). If there is more than one eigenvector with \(\lambda=1\), then a weighted sum of the corresponding steady state vectors will also be a steady state vector. Therefore, the steady state vector of a Markov chain may not be unique and could depend on the initial state vector.
Markov Chain Example
Suppose we want to build a Markov Chain model for weather predicting in UIUC during summer. We observed that:
- a sunny day is \(60\%\) likely to be followed by another sunny day, \(10\%\) likely followed by a rainy day and \(30\%\) likely followed by a cloudy day;
- a rainy day is \(40\%\) likely to be followed by another rainy day, \(20\%\) likely followed by a sunny day and \(40\%\) likely followed by a cloudy day;
- a cloudy day is \(40\%\) likely to be followed by another cloudy day, \(30\%\) likely followed by a rainy day and \(30\%\) likely followed by a sunny day.
The state diagram is shown below:
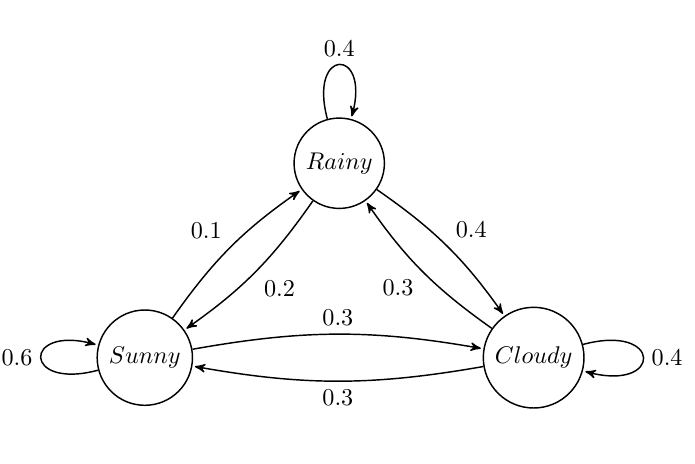
The Markov matrix is
If the weather on day \(0\) is known to be rainy, then
and we can determine the probability vector for day \(1\) by
The probability distribution for the weather on day \(n\) is given by
Review Questions
- See this review link
ChangeLog
- 2018-04-01 Erin Carrier ecarrie2@illinois.edu: Minor reorg and formatting changes
- 2018-03-25 Yu Meng yumeng5@illinois.edu: adds Markov chains
- 2018-03-01 Erin Carrier ecarrie2@illinois.edu: adds more review questions
- 2018-01-14 Erin Carrier ecarrie2@illinois.edu: removes demo links
- 2017-11-02 Erin Carrier ecarrie2@illinois.edu: adds changelog, fix COO row index error
- 2017-10-25 Erin Carrier ecarrie2@illinois.edu: adds review questions, minor fixes and formatting changes
- 2017-10-25 Arun Lakshmanan lakshma2@illinois.edu: first complete draft
- 2017-10-16 Luke Olson lukeo@illinois.edu: outline